



MoFTaG - Model-free flexible trajectory generation
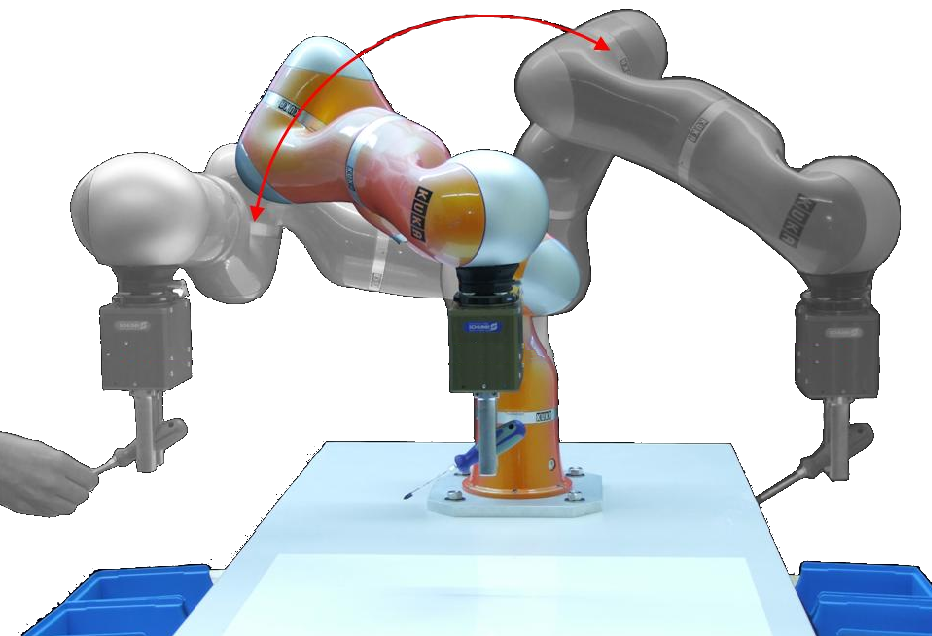
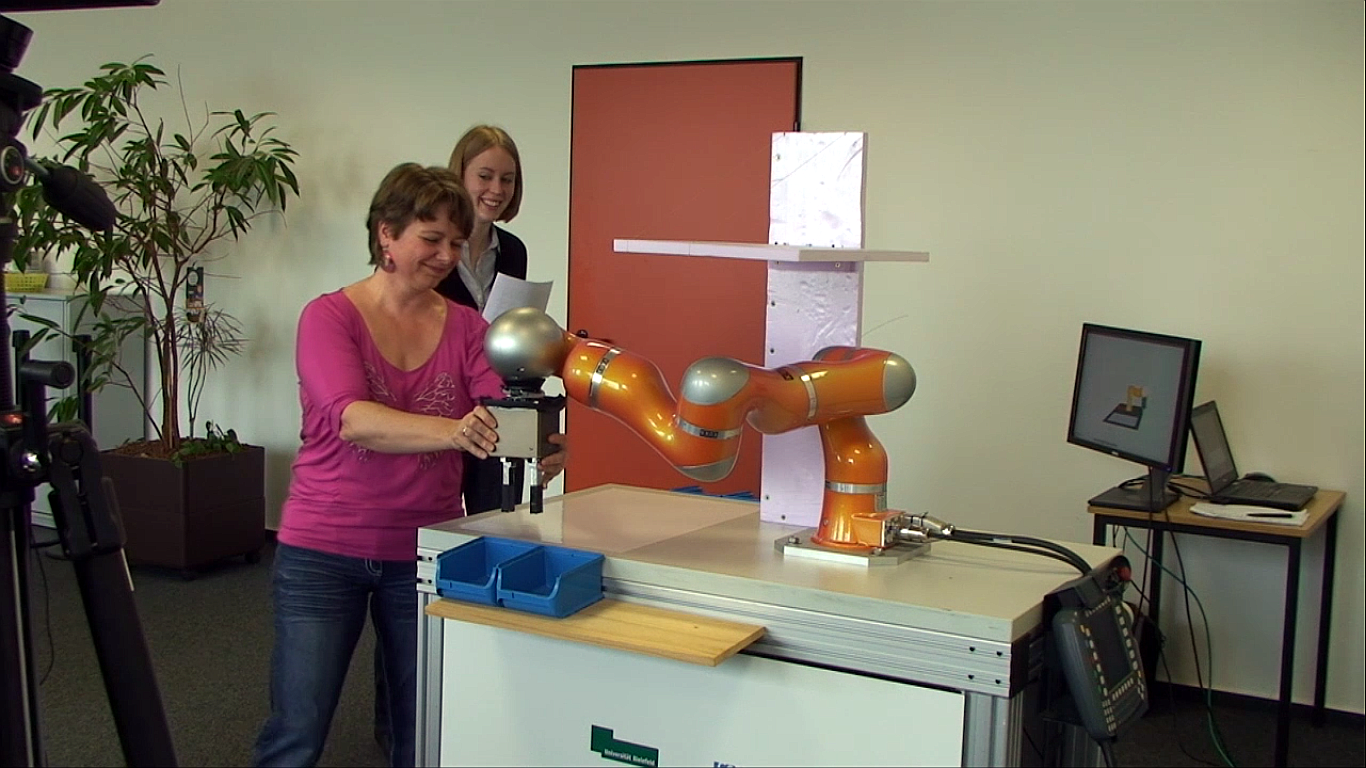
The ever increasing demand for just-in time and custom-tailored production calls for fast and flexible reconfigurable work cells and human-robot co-worker applications. We are convinced that redundant robot-arms will play a key role due to their flexibility. Current technology requires for each new task costly and tedious reprogramming by experts. To facilitate and speed up this inefficient process, we propose to use physical Human-Robot Interaction (pHRI), which means manipulation of a compliant arm through direct contact, as an intuitive way to teach a redundant robot arm valid postures in a constrained working place. This could provide a major building block enabling fast, efficient and therefore cheap reconfiguration of redundant robots. The goal of MoFTaG is to test and evaluate systematically the method in a concrete co-worker scenario and to include online feedback through a perceptual component. We were already able to conduct a first study on usability of pHRI in collaboration with our industrial partner Harting. For us, workers at Harting are of special interest as they are potential users of such redundant robot-arms used as assisting 'third hand' relieving them of hard physical labor. MoFTaG complies with the spirit of ECHORD in transforming and “improving a laboratory setup towards practical usability” (ECHORD call) based on available technology.

| Size | Modified | |
| moftag.png | 306 KB | 2012/06/19 |
| moftag_1.png | 1.83 MB | 2012/06/19 |
| moftag_2.png | 1.81 MB | 2012/06/19 |

Experimenting partners
Universität Bielefeld (Coordinator)



