



TACTIP - Tactile fingertip for robots
The TACTIP project addresses a number of robotics issues: the need for improved tactile sensors for robot manipulators and the creation of tactile probes for many applications. Tactile probes will need to function over a range of materials with different deformation properties. In particular, robots dealing cooperatively with humans and especially, robots required to touch humans (e.g. assistive care robots, co-operative assembly robots) need improved tactile sensors.
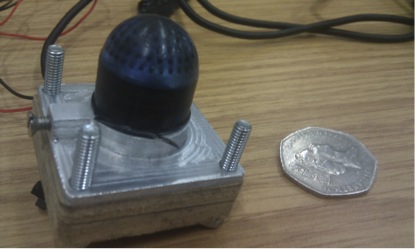
The TACTIP project is a biologically inspired tactile robot fingertip that reflects on the nerve structure found in a human fingertip, in particular the Dermal Papillae. Movement of developed artificial papillae is monitored using an image camera. The image data is then interpreted into contextual contact data such as shape and direction of an edge or raised bump. The initial prototype is just over twice the size of a human fingertip.
The current experiment is resolved into 6 tasks which, address issues of performance benchmarking, ‘miniaturisation’ and integration of the probe into a robot hand, developing feature extraction and robot actuator control based on tight sensori-motor loops (e.g. find a more dense ‘lump’ in a deformable material). The final demonstrator will show these advanced capabilities in a series of demonstrations ranging from feature following (e.g. small ridge) to the reading of Braille characters.
| Size | Modified | |
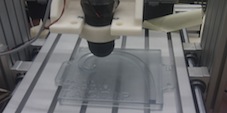
| Cartesian table test.jpg | 13 KB | 2011/10/18 |
| Small prototype.jpg | 29 KB | 2012/03/19 |
| TACTIP_hand.png | 55 KB | 2011/12/13 |

Experimenting Partners
University of the West of England (Coordinator)



