



ActReMa - Active Recognition and Manipulation of Simple Parts Exploiting 3D Information
In the ActReMa experiment, the University of Bonn and Metronom Automation GmbH investigate a bin-picking task for machine feeding. This is an industrially relevant application which today still requires human labor.
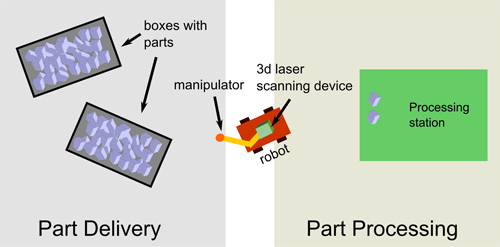
A mobile robot equipped with a 3D laser scanning sensor and two flexible arms has to take out parts from a transport box. Initially, the parts are known to the robot, but they are piled randomly in the box. After approaching the box, the robot makes a 3D scan of the parts and recognizes the upper layer of parts based on the detection and fitting of shape primitives to the measured point cloud. Next, the robot determines accessible parts and plans collision-free arm motions for grasping. It selects the most suitable grasp, picks the part, and delivers it to a processing station.
In the second phase of this experiment, the robot will learn new part models from brief presentations and will handle occlusions by planning its scan poses for active exploration of the box.
Finally, the developed technology will be transferred to a real-world industrial application.
|
|
|
| Size | Modified | |
| ActReMa_Scenario.jpg | 70 KB | 2011/10/17 |
Experimenting Partners
Rheinische Friedrich-Wilhelms-Universität Bonn (Coordinator)



