RODIN - Robust control of human-robot-environment dynamic interaction for natural stone carving
Stone carving is one of the oldest representational arts. However, due to extreme labor-intensive work, difficult operating environment and global cost disadvantages, the traditional European sculpturing recently has become an endangered art. The processes of sculpture manufacturing and restoration must urgently evolve technologically to remain competitive in the international market.
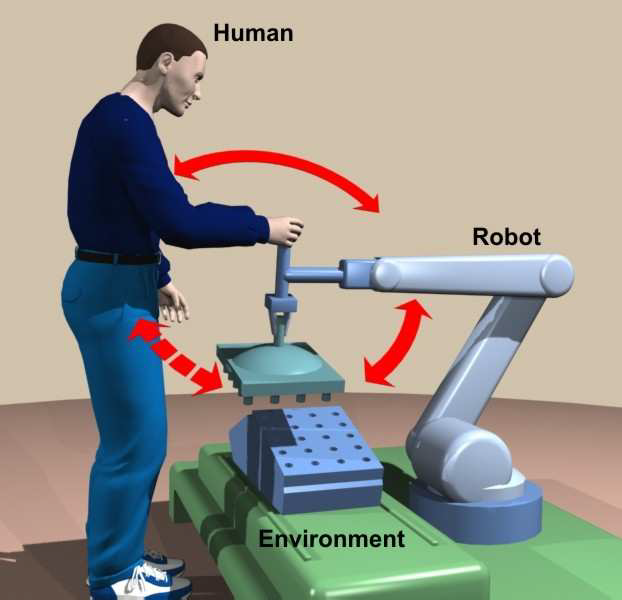
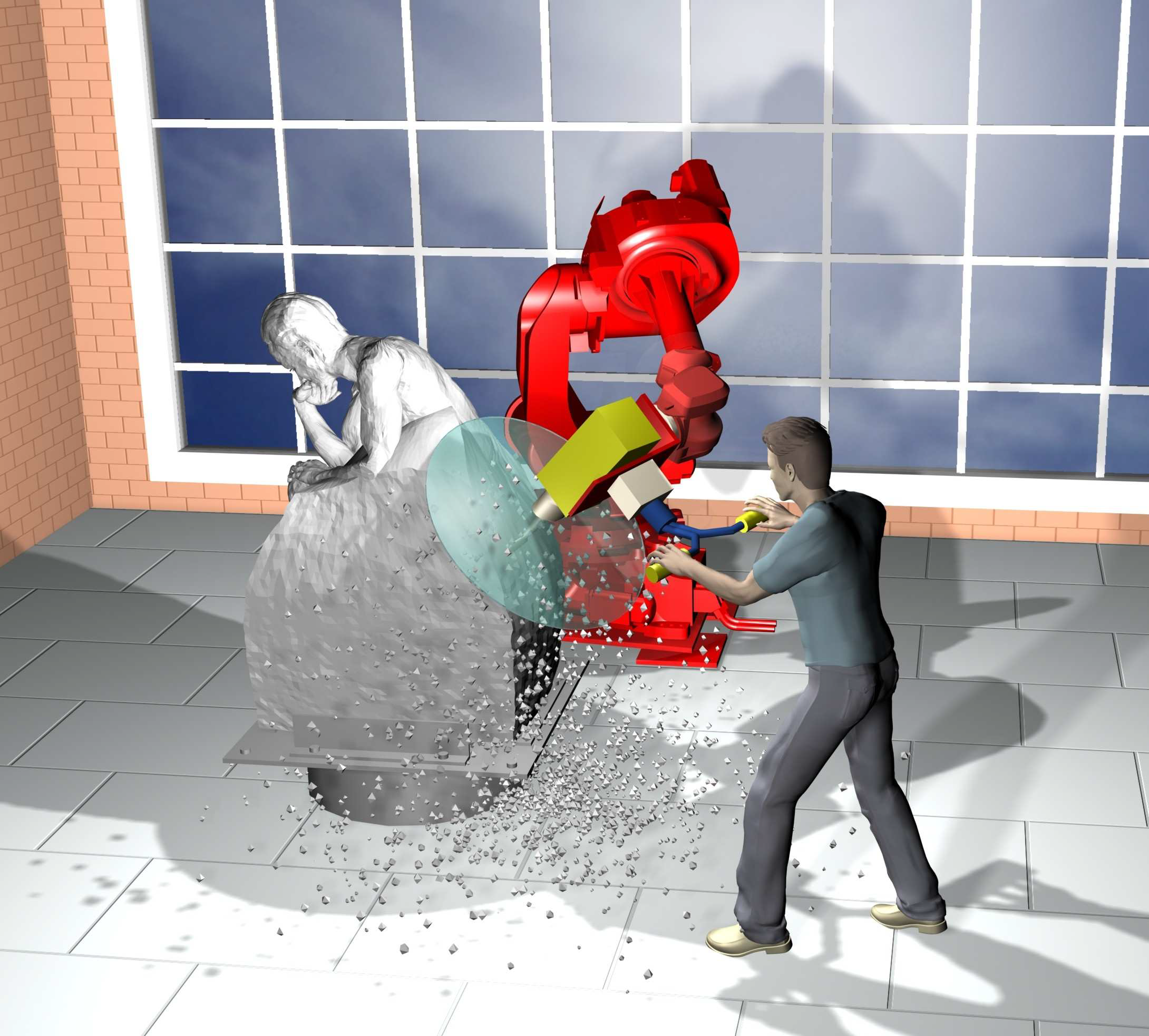
The aim of the RODIN experiment is to prove experimentally the feasibility of concepts that extend industrial robot usage as an intelligent power tools carrier and as an active assistant supporting dynamic physical human-robot-environment interaction during the complex and demanding artistic work of hard natural stone carving. This novel promising concept will enormously increase efficiency and productivity of artistic stone processing, reduce hazards, improve ergonomics as well as health and safety of the worker.
The RODIN experimental investigation will considerably contribute to the gathering of the knowledge and experience concerning robot stability, safety and reachable performance during cooperative operation in high demanding stone carving and similar manufacturing contact tasks with very hard environment.
 |
| Size | Modified | |
| rodin.png | 360 KB | 2012/06/19 |
| rodin2.png | 3.05 MB | 2012/06/19 |