



HYROPA - Hyper-flexible robot cells using reconfigurable passive kinematics
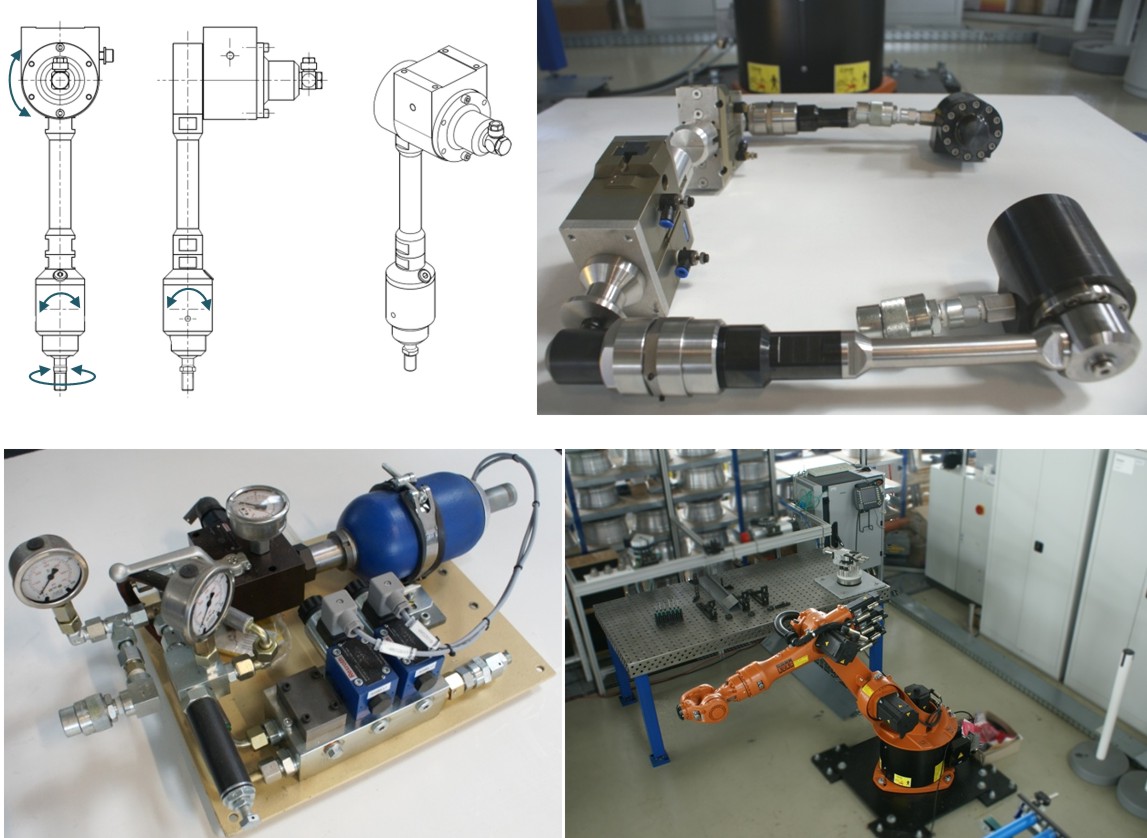
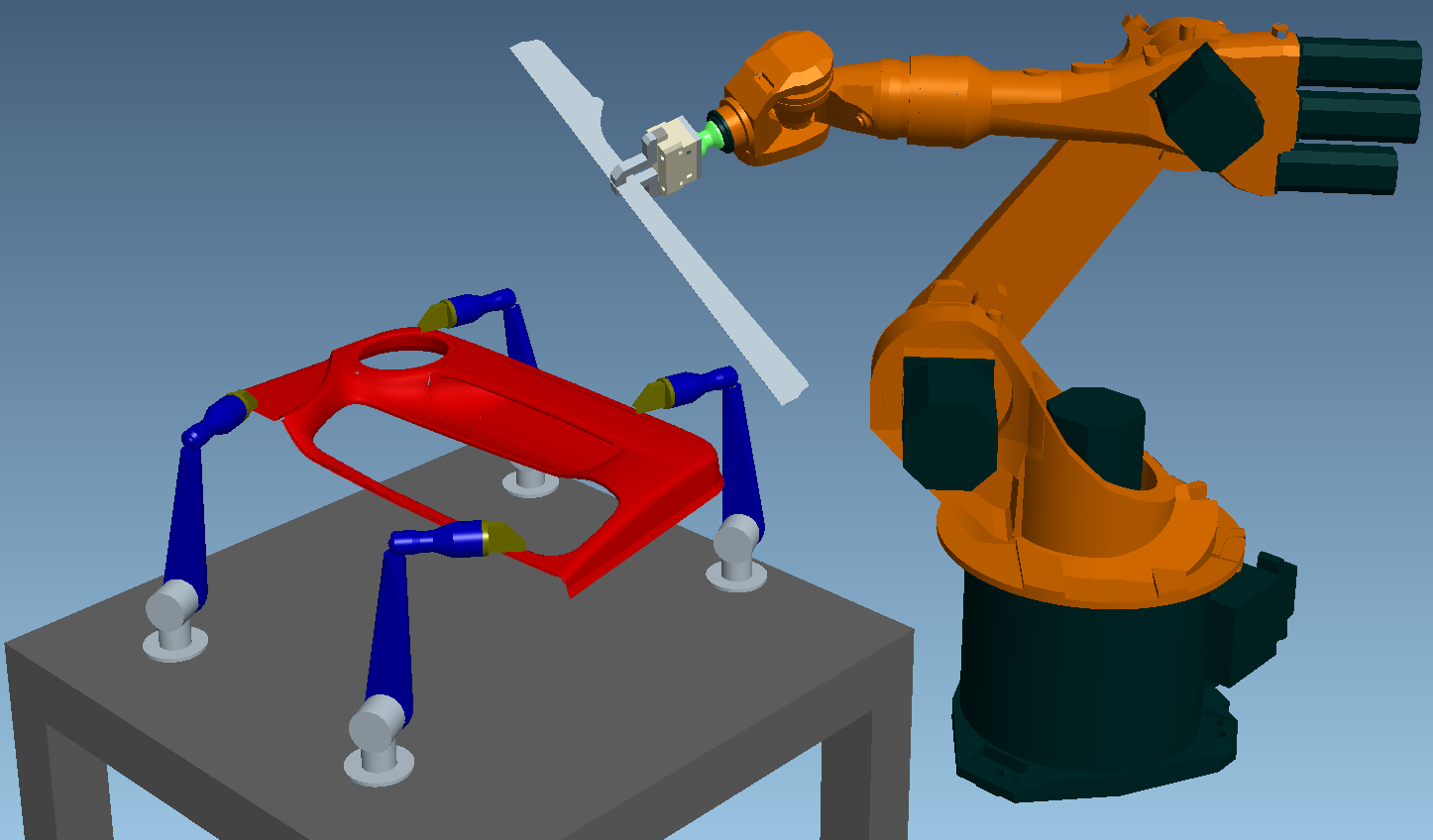
In the HYROPA the use of reconfigurable passive articulated arms will be examined, in order to enable the support of different work tasks in standard industrial robot cells. Passive kinematics can expand the level of flexibility of existing robot cells, where they can be adapted to different components and individual work pieces. Accordingly, passive kinematics is used to hold and easily manipulate work pieces in the workspace of an industrial robot. The passive kinematics for this purpose can be locked in almost any position by clamping the individual joints. Reconfiguration of the passive kinematics will be done by the industrial robot. Thus, an automated change-over is possible without manual intervention.
The HYROPA experiment addresses the ECHORD research focus “robot hands and complex manipulation”, within the scenario “hyper-flexible cells”, as the technology allows an automatic adaption to a variety of given tasks from the industrial repertoire. The major advantages of using reconfigurable passive kinematics are the lower complexity and lower costs in the construction and operation of robot cells, while at the same time offering good adaptability to small production volumes.

| Size | Modified | |
| hyropa_arm and hydraulic system.jpg | 169 KB | 2011/10/18 |
| hyropa_simulation.png | 142 KB | 2011/12/13 |
Experimenting Partners
Fraunhofer IFF (Coordinator)



