ALEXA - An advanced light-weight robot arm for flexible and mobile applications in hyper-flexible cells
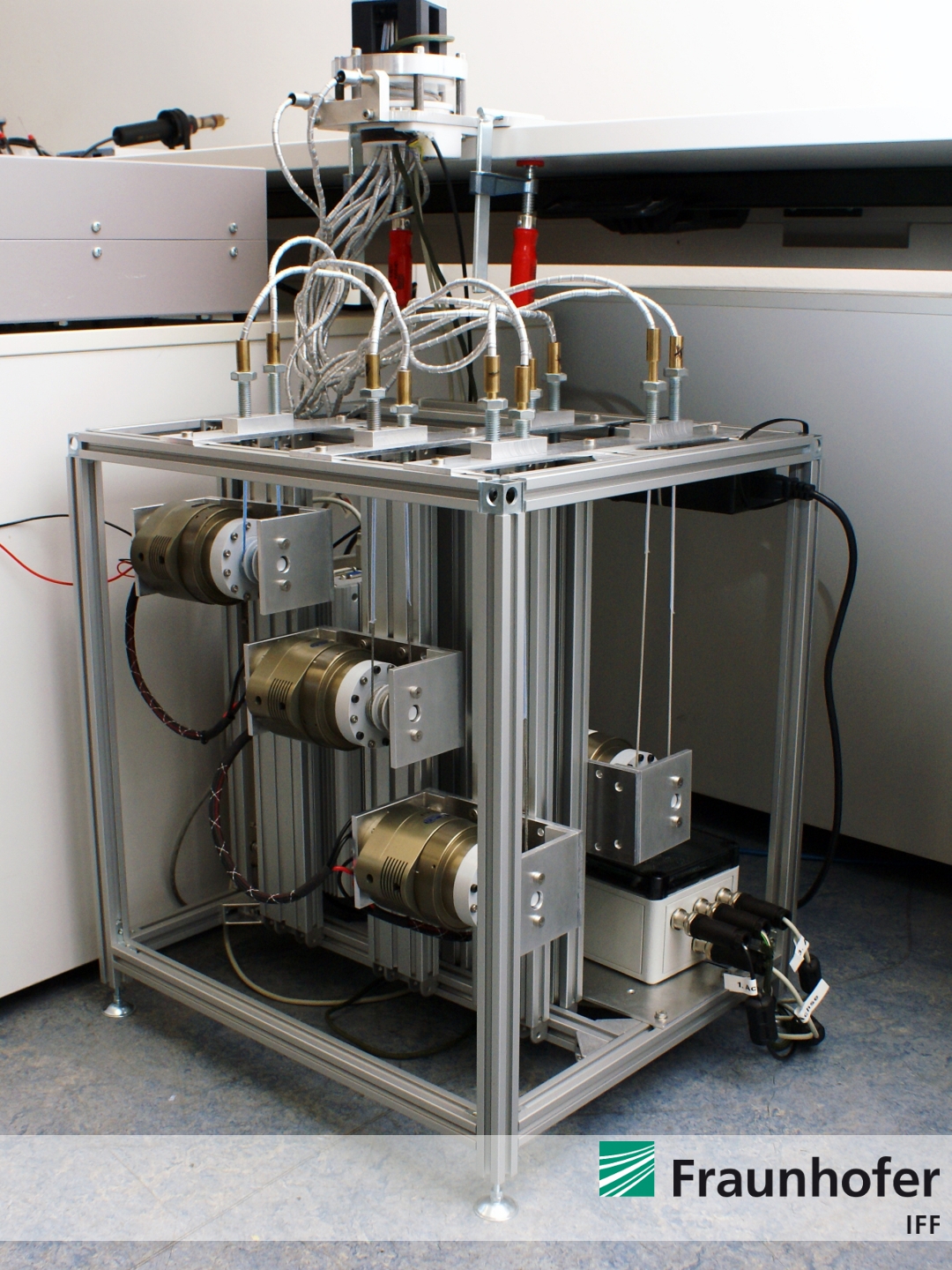
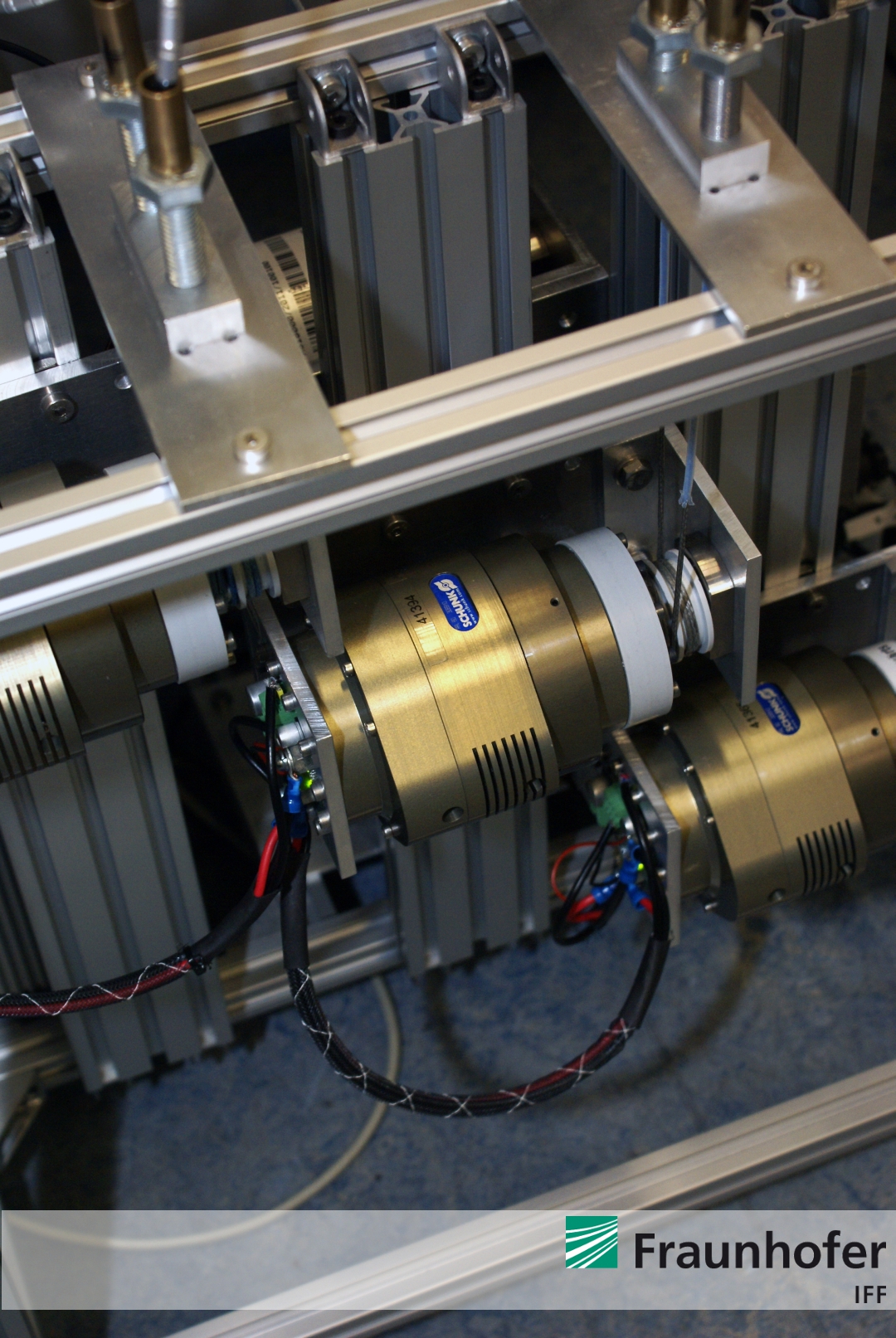
The ALEXA experiment will test the capabilities of a new lightweight manipulator, which was made using the innovative and low-cost robolink construction kit from igus®. The robolink joints are cable-driven and connected with lightweight, carbon fiber-reinforced plastic links. The Fraunhofer IFF will develop a 5-DOF robolink manipulator for use as an assistant in flexible cells. In contrast to common industrial manipulators, its compact drive system comprised of SCHUNK rotary units can easily be detached for enhanced portability.
The main focus of the ALEXA experiment will be on the use of portable robot manipulators in hyper-flexible cells, as demonstrated in a common pick-and-place scenario. Three cameras and Visual Servo Control technology will be used to control the positioning of the manipulator so that it can grip objects. The advanced control system will also allow for quick and simple on-site, situational programming.
In particular, the portability, simple situational programming, and high adaptability will be tested in the ALEXA experiment. The fulfillment of this criterion is essential for robolink manipulators to be used as an easily-transportable automation tool for small and medium-sized enterprises and achieving them will mark an important milestone in developing low-cost robot manipulators with high portability.

| Size | Modified | |
| ALEXA_Compact drive unit.jpg | 1.03 MB | 2011/12/07 |
| ALEXA_detailed view.jpg | 1.13 MB | 2011/12/07 |
| ALEXA_robotic arm.jpg | 887 KB | 2011/12/07 |
| ALEXA_Wrist joint.jpg | 852 KB | 2011/12/07 |