dimRob - Robotics on construction site - dimensional tolerance handling
The dimRob experiment aims to examine and demonstrate strategies for handling imprecision and tolerances in construction work. These deviations and tolerances are unique –because they are at the construction site, where the product (i.e. the building) is considerably larger than the fabrication tool.
DimRob mainly addresses the cognitive factory scenario. At a construction site, the robot is no longer operating in a controlled environment and is therefore in need of cognitive skills: perception of assembly objects (location of material and material tolerances), as well as context conditions (site tolerances and positioning/relocation) is required. Furthermore, as manual labor and robotic manufactured elements are combined on a construction site, the robotic system should be fault-tolerant and adapt autonomously to changing conditions.
The core contribution of the DimRob experiment is the implementation of industrial robots at construction sites, thus advancing the use of new technologies in the building industry and opening up new market possibilities for the robot industry.
 |
| Size | Modified | |
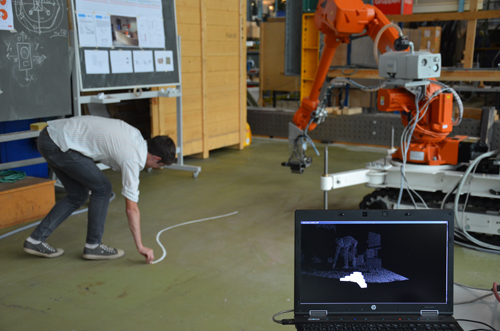
| Building according to the recorded hand movements.jpg | 158 KB | 2011/10/18 |
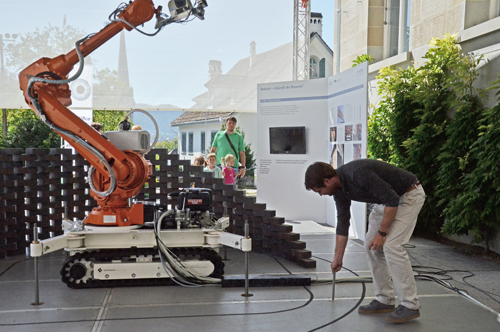
| Building.jpg | 660 KB | 2011/10/18 |
| Preparations for the building.jpg | 209 KB | 2011/10/18 |
| Scanner recognising the hand's movement.jpg | 168 KB | 2011/10/18 |
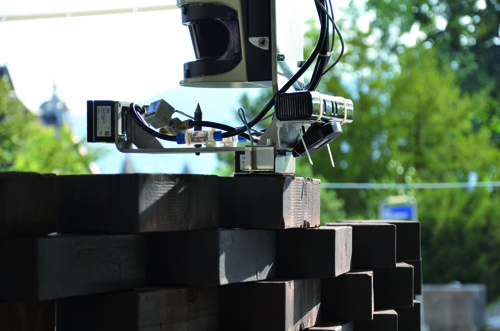
| Sensors recognising the tolerances of the material.jpg | 667 KB | 2011/10/18 |