



TESBE - Technologies for Efficient and Safe Body Extenders
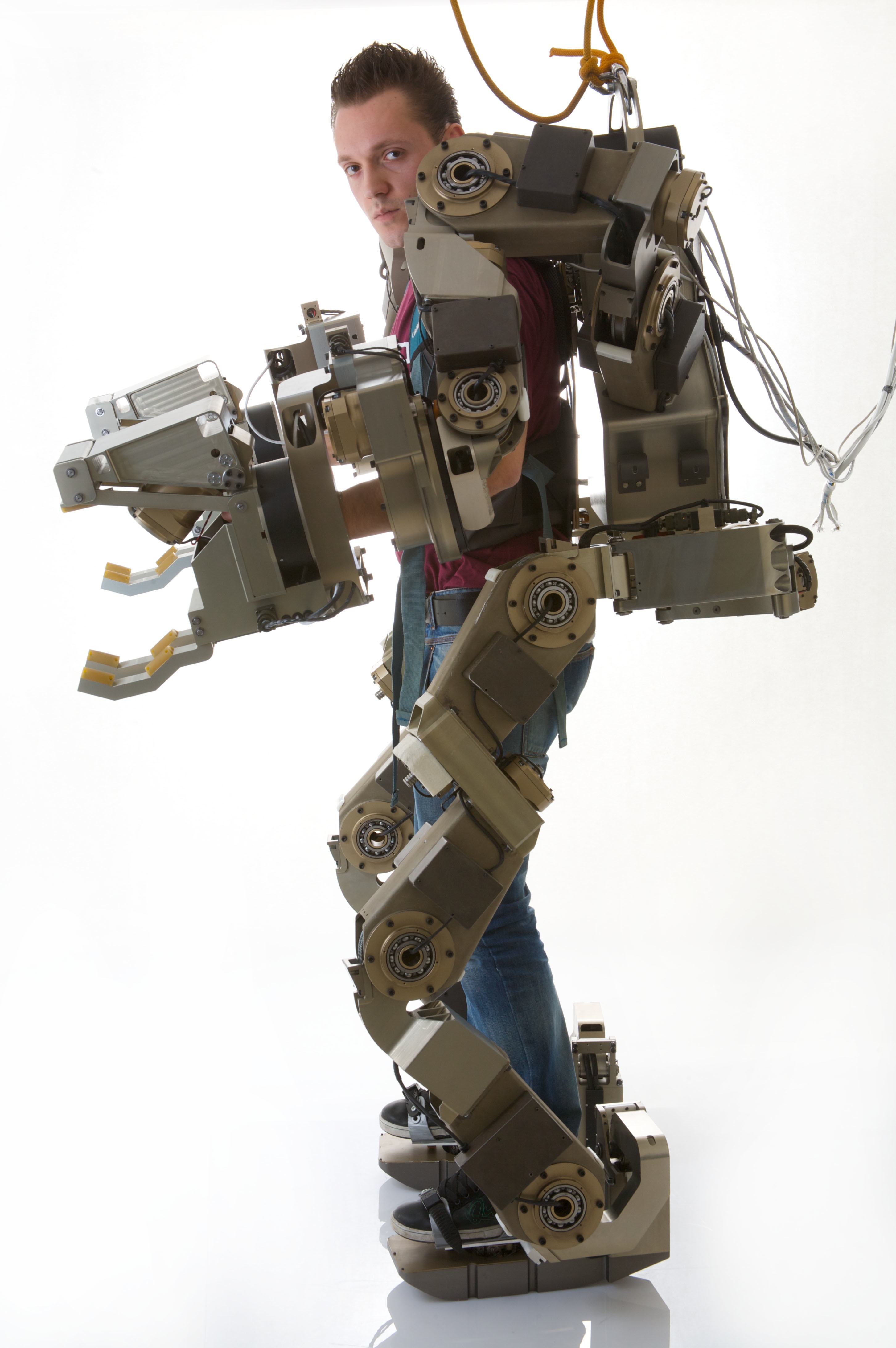
Body Extenders are an emerging class of advanced robots that can be worn by human operators to dramatically increase physical performance.
The overall goal of the TESBE experiment is to make viable use of such wearable devices in practical application scenarios, like the prompt removal of debris for the rescue of victims of natural and man-made disasters.
TESBE is one of the ECHORD experiments contributing to the human-interaction research focus. The robotic community sees this as a high priority topic to be addressed in order to allow the future introduction of a new generation of service robots to our societies that can successfully collaborate with humans.
The scientific and technological contributions expected by the TESBE experiment results are, firstly, the definition of new control strategies and techniques that could improve the response of the device to the operators’ motion intention while at the same time guaranteeing safety in the various operating conditions. Secondly, a new gripper concept will be introduced that could allow to stably grasp diverse typologies of objects, with very different shapes, dimensions and consistency.
 |
 |
| Size | Modified | |
| TESBE1.jpg | 1.38 MB | 2011/05/24 |
| TESBE2.jpg | 1.12 MB | 2011/05/24 |
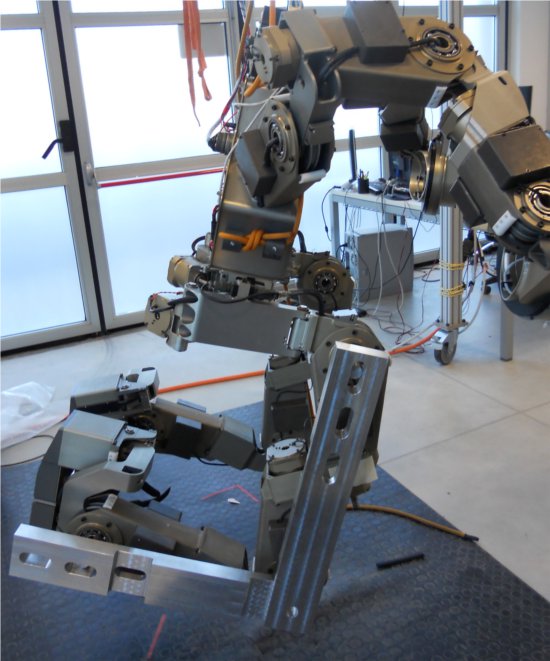
| TESBE_experimental setup.jpg | 27 KB | 2011/12/13 |
| TESBE_feet.jpg | 46 KB | 2011/12/13 |
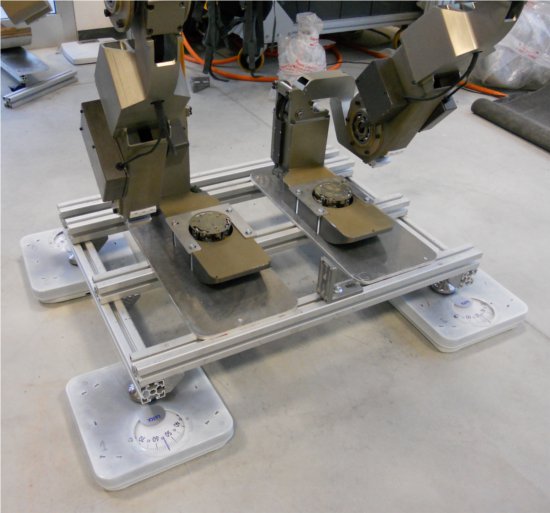
| TESBE_measuring the center of gravity.jpg | 47 KB | 2012/03/19 |
| TESBE_Use of the calibration jig.jpg | 68 KB | 2012/03/19 |



| Size | Modified | |
| Video_TESBE_01_03_2011.mp4 | 77.48 MB | 2011/06/28 |



