FIDELIO - FIxtureless DEburring of wheeLs by human demonstratIOn
Modern industrial robots are complex and powerful machines, able to execute a variety of different tasks with high speed and accuracy. Nevertheless, they still have a low degree of autonomy and adaptability, and need the presence of a human operator to learn new tasks or tune existing ones.
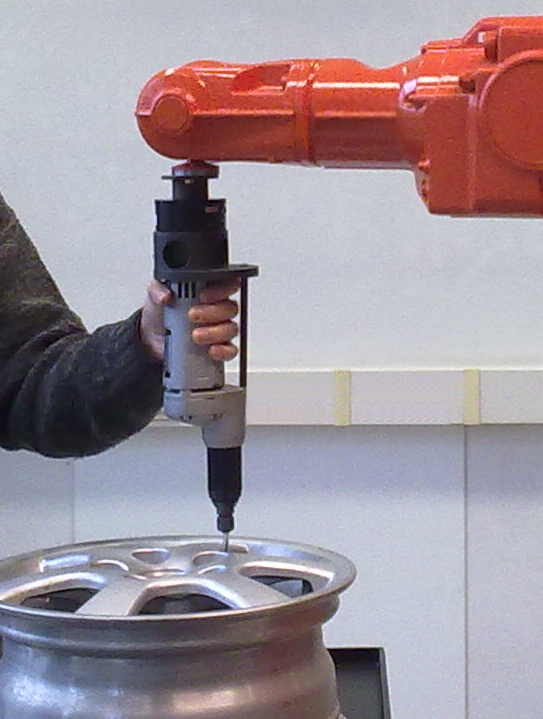
In the last twenty years, however, robotic researchers have been focusing on the Learning From Observation paradigm, developing prototypic robotic systems able to observe and learn from human operations. In this new paradigm, the information coming from a variety of observations, is analyzed and transformed into an abstract representation of the task. By using such information, and exploiting the abstraction capabilities of a suitable cognitive system, the robot is able to autonomously generate a program to reproduce the task, even in an environment which is different from the one observed during the learning phase.
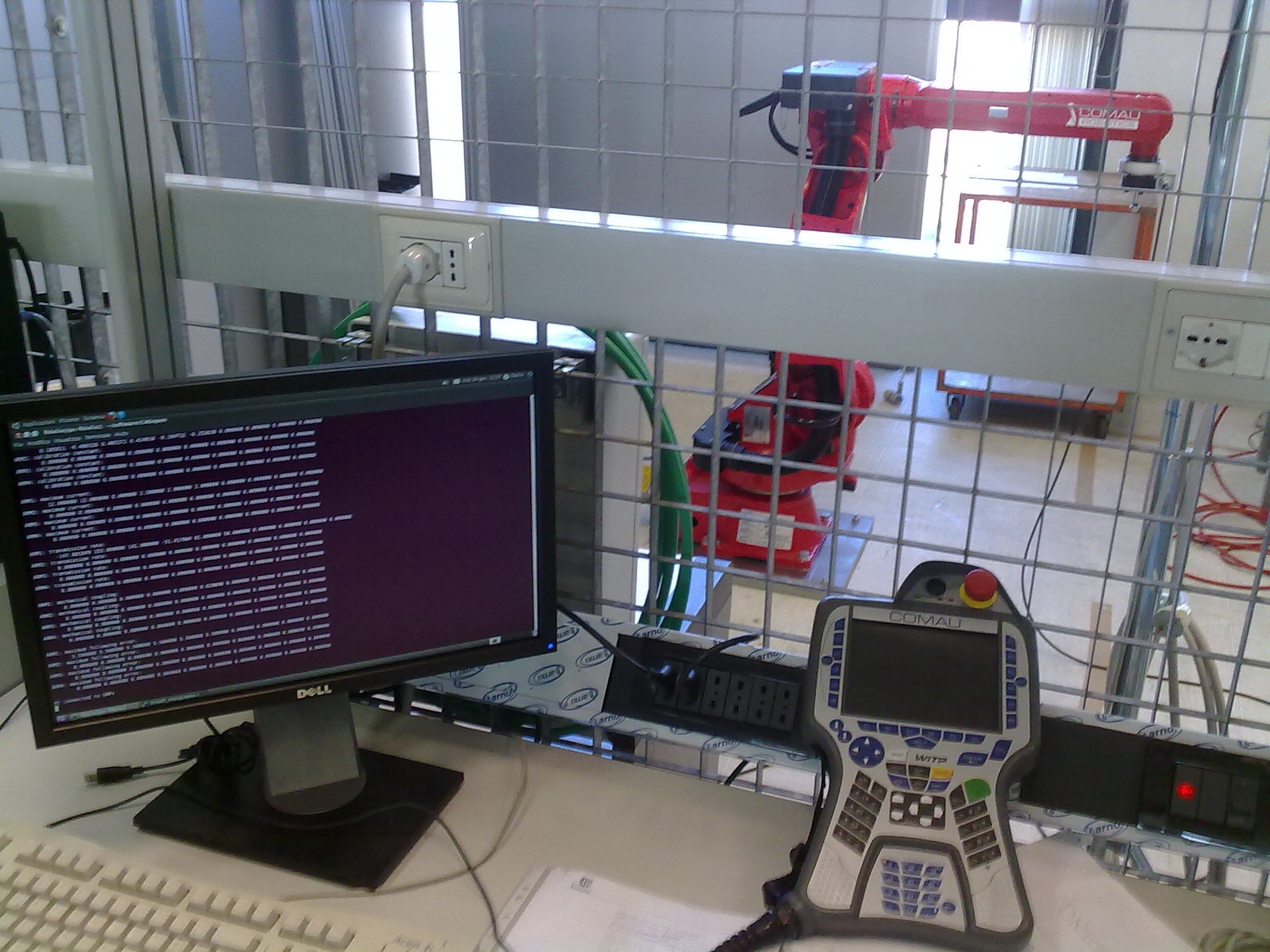
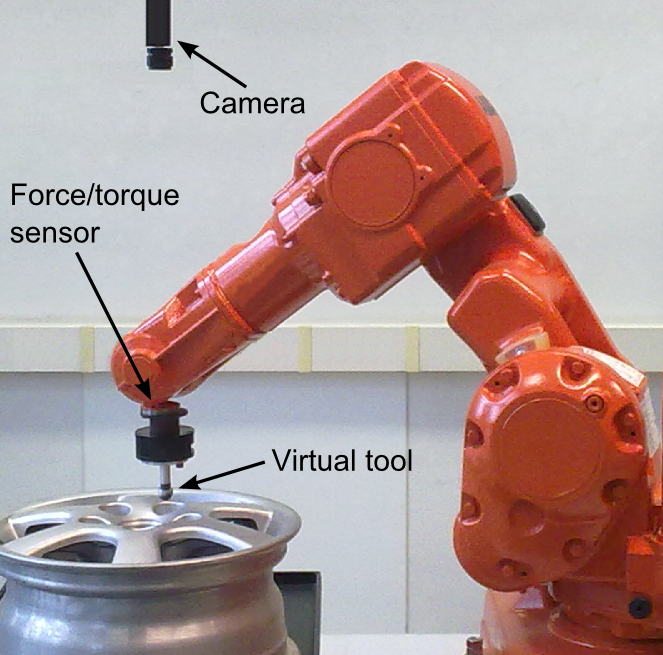
The FIDELIO project wants to investigate the feasibility (and the related advantages) of this innovative approach in an industrial application scenario, exemplified by a fixtureless wheel deburring task. To this aim, a robotized cell will be set up, composed of a six degree-of-freedom industrial manipulator and a workstation where aluminum wheels are placed for deburring. On top of the workstation a camera frames the workspace in order to localize the wheel. The arm is equipped with a pneumatic deburring tool connected to the robot end-effector through a force/torque sensor. In addition, an eye-in-hand camera, framing the cutting tool and the deburring edge, is mounted at the robot end-effector.
 |
| Size | Modified | |
| Comau&FTsensor.jpg | 506 KB | 2012/03/26 |
| ControlStation.jpg | 481 KB | 2012/03/26 |
| FIDELIO_logo.png | 165 KB | 2011/10/18 |
| ManualGuidance.jpg | 579 KB | 2012/03/26 |
| naked_comau.png | 6.22 MB | 2011/10/25 |
| roboticCell_annotated.png | 619 KB | 2011/10/17 |
| teaching.png | 513 KB | 2011/10/17 |