ContainerBot - Stochastic impact-triggered mobile manipulation for fast cycle time unloading of variable-sized boxes from unordered piles
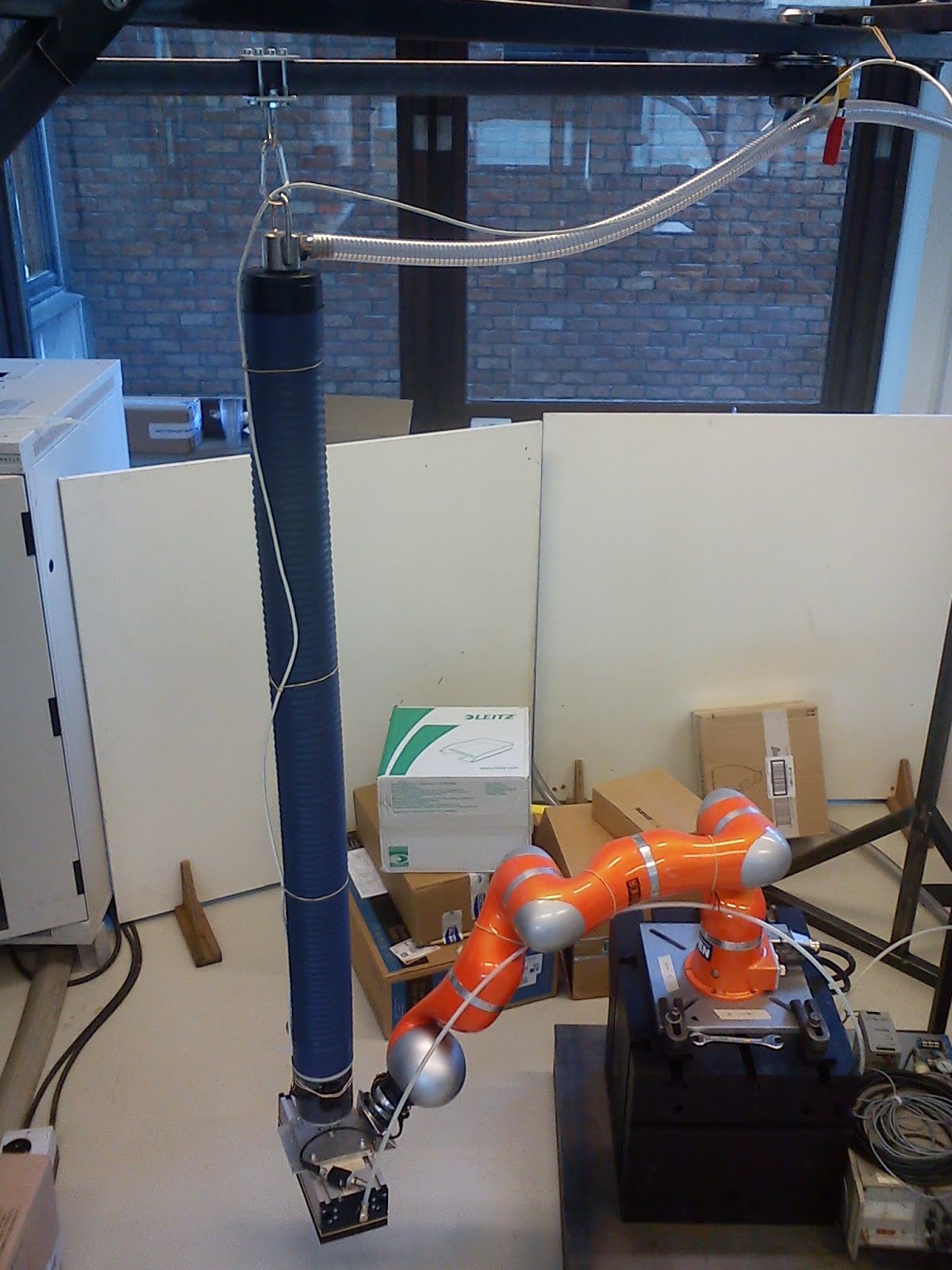
The ContainerBot experiment looks at new ways to empty standard shipping containers with new robot technology. This experiment uses one or two KUKA Lightweight robot arms to pick up light ( <5kg) or heavy ( <10kg) boxes of various sizes and shapes in unordered stacks. Applications are automatic emptying of parcel containers, assisting persons with robots for lifting or positioning of heavy equipment and flexible use of robots in factory work cells.
 |
 |
| Size | Modified | |
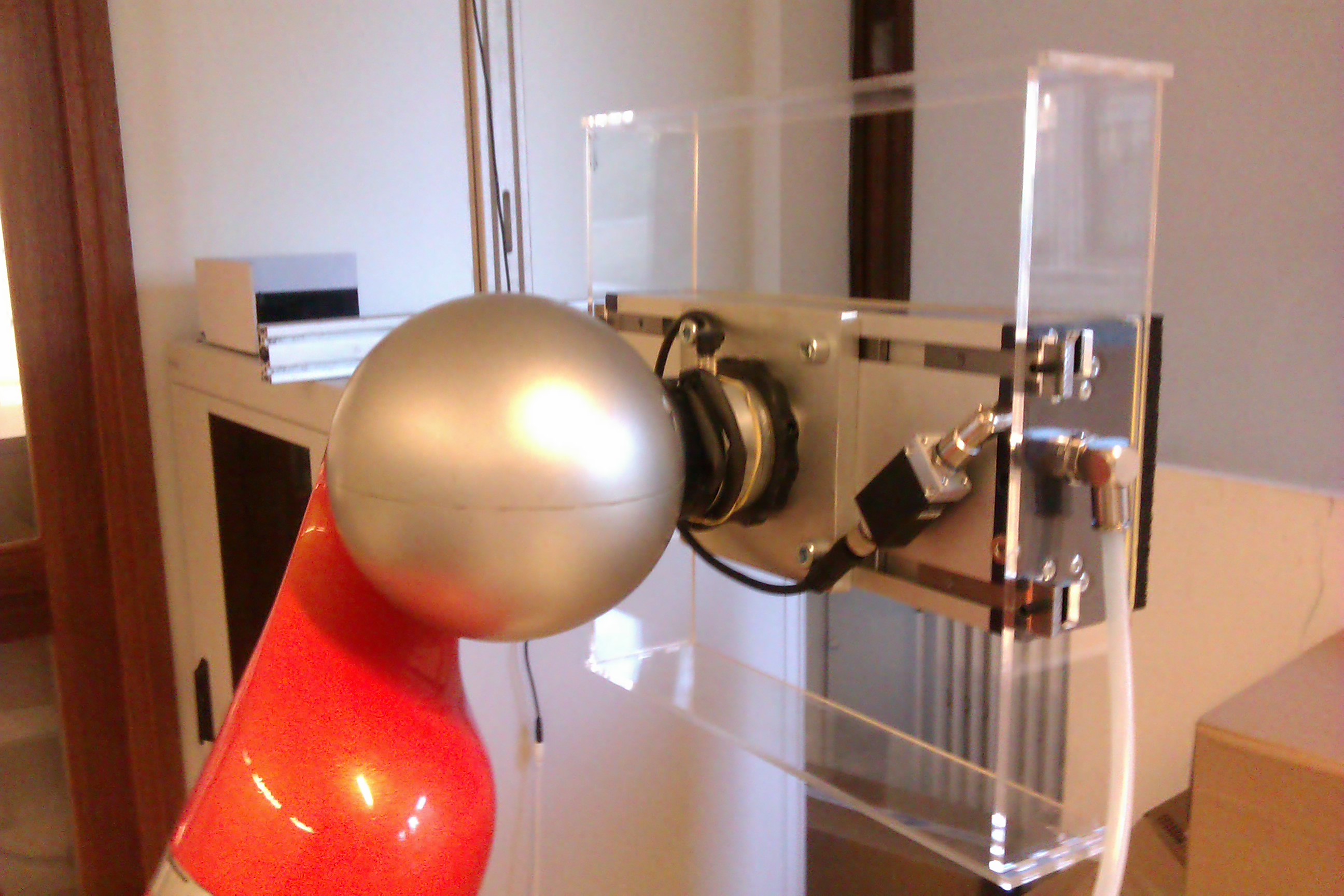
| Coupling of gripper with LWR and lifting device.jpg | 142 KB | 2012/12/13 |
| Setup with lifting device and LWR.jpg | 204 KB | 2012/12/13 |
| vacuum gripper1.jpg | 692 KB | 2011/10/18 |
| vacuum gripper2.jpg | 1.03 MB | 2011/10/18 |