HANDS.dvi - A DeVice-Independent programming and control framework for robotic HANDS
The scientific goal of the HANDS.DVI (Hands DeVice-Independent language) experiment is the development of a common framework for programming robotic hands independently from their kinematics, mechanical construction, and sensor equipment complexity.
Recent results on the working of the human hand in grasping and manipulation are the inspiration for this project. The human hand is a redundant structure, with many degrees of freedom with respect to the dimension of the controlled workspace. The hand’s sensor motor transformations pose constraints on degrees of freedom, so that the number of effective degrees of freedom is much lower than the number of joints. The reduced set of parameters which is effectively used by humans to control the hands is known in literature as the set of synergies. This set of synergies represents the theoretical foundation for this experiment’s innovative approach to the design of a unified framework for robotic hands control.
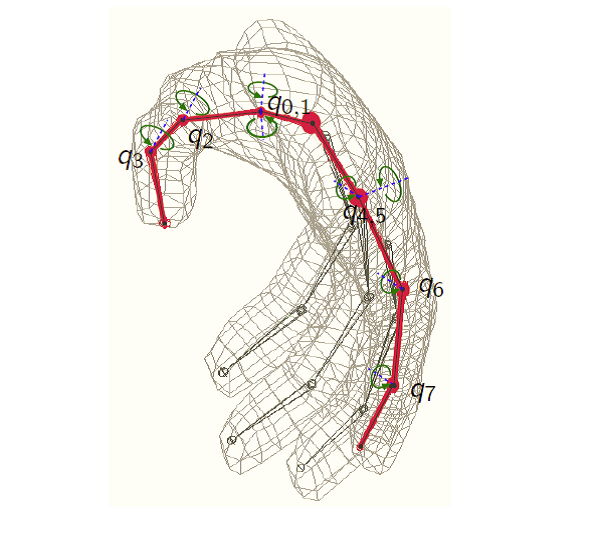
A kinematic model of an anthropomorphic robotic hand embodying synergies will be developed. Theoretical tools will be studied to design a suitable mapping function of the control action (decomposed in its elemental actions, synergies) from the paradigmatic hand domain to the articulated hand co-domain.
Furthermore, at the synergy level, control will be device independent, leading to a sort of standardization between control strategies among robotic hands with dissimilar structures.
The advantages and the limits of this approach will be assessed both analytically and with numerical simulations. Finally, the developed control framework will be applied on an experimental set up consisting of three robotic hands with dissimilar kinematics, grasping an object instrumented with force sensors.
The experiment’s results will encourage the diffusion of robotic hands in advanced industrial environments, such as hyper flexible cells. Furthermore, the design of robotic control systems that “think” like human hands will ultimately promote human-robot interaction and cooperation.
.png) |
 |
 |
| Size | Modified | |
| Experimental setup.png | 123 KB | 2012/03/19 |
| Hand grasping a cube.jpg | 1.86 MB | 2012/03/19 |
| Hand grasping a cylinder.jpg | 1.96 MB | 2012/03/19 |
| Hand grasping a sphere.jpg | 1.98 MB | 2012/03/19 |
| Hand with whole system.JPG | 389 KB | 2012/03/19 |
| kinematic model.png | 141 KB | 2011/05/24 |
| Logo HANDS.DVI.png | 26 KB | 2011/12/12 |