AssRob Tool Instrumentor - Semi-autonomous surgical tool Instrumentor for robot co-workers in hip-surgery
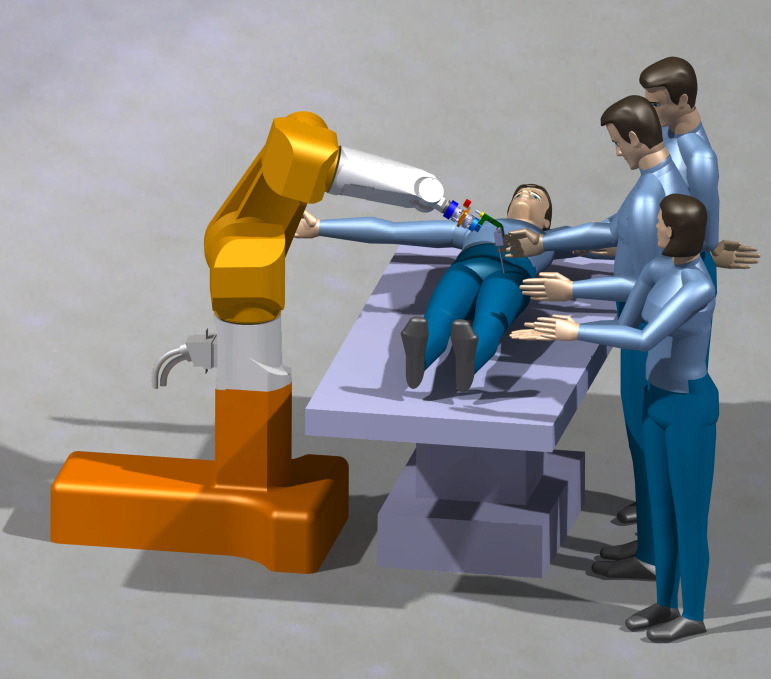
The main innovation of the AssRob Tool Instrumentor experiment is to create a semi-autonomous two-arm assistant bone lever holding robot system and to demonstrate that it can take over the tiring lever holding and handing over task from a human assistant.
Specific challenges have been identified that have to be met in order to allow the successful deployment of such an assistant robot system in the operation theatre. These are, for example, the guarantied safety of patient and medical staff during robot interaction, semiautonomous cooperation with the surgeon, the capability of holding two surgical instruments at a time, detecting and approaching the surgical instruments and the capability of applying the required forces. All this must be designed in a way that will not alter the commonly known operation work flow to be implemented into routine surgery easily.
One major challenge that remains to be solved in the frame of this proposal is the manual adduction of the two-arm robot towards the bone levers handed over by the surgeon. This currently forces the surgeon to use both his hands, one for holding the lever and one for force controlled manual adduction of the robot arm, resulting in a delay and change of the work flow. The goal is to show the capability of the robot to autonomously recognize the bone lever in space and then approach it close enough, just like a human assistant does, to enable the surgeon to couple already in situ placed bone levers and retractors to it.
 |
 |
| Size | Modified | |
| assrob2.png | 795 KB | 2012/10/18 |