HUROBIN - Human-Robot Object Interaction
The targeted research focus of the experiment is the human-robot interfacing and safety investigating the human-robot co-worker scenario, depicting the case in which the human operator and the robot agent handle the same object: the robot is supposed to bear the load while the human leads the movement of the object in a co-operative pick and place task.
The focus of this research is the human robot co-operation, interfacing and consequently the safety for the human operator. According to such purpose, the human forearm movements will be measured by means of a tracker in order to ensure a whole safe operation. Furthermore, the tracker and a dataglove operated by the human will lead the robot in a sort of master-slave tele-operation during the reaching and the grasping phases.
The robot has distributed position sensors and a torque/force sensor on the wrist joint, during the object handling, the robot sensors will be selectively ignored or deactivated (simulating a failure), while the tracker sensor will guarantee the sensor redundancy, which is mandatory for the safety.
The final achievement of this experiment will be the implementation of a robust control mixed with sensor redundancy, overcoming the sensor failure, or at least the identification of a severe failure, in a sort of tree fault analysis for a human-robot co-operation (specifically in the case of co-handling).
Human robot co-operation is one of the promising approaches to flexible manufacturing. The HUROBIN experiment is focused on the specific task of co-handling an object through a safe interaction: both the tele-operation and the coupled manipulation will be implemented in an integrated human-robot scenario. At the moment, safety in manufacturing automatic cells is achieved using safety devices such as light curtains, scanners, mats, etc. This implementation does not allow the worker to enter in the cell, in fact preventing the worker from co-operating with the manipulator. The Hurobin experiment aims at developing a safe scenario for the human-robot cooperative manipulation, including both sensor redundancy and the implementation of a robust control strategy.
 |
| Size | Modified | |
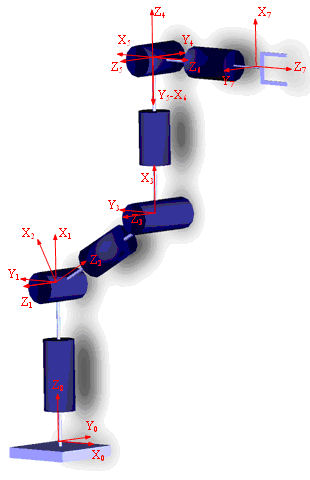
| Kinematics scheme of robotic arm.jpg | 22 KB | 2011/10/18 |
| Robot_resize.jpg | 134 KB | 2011/12/13 |
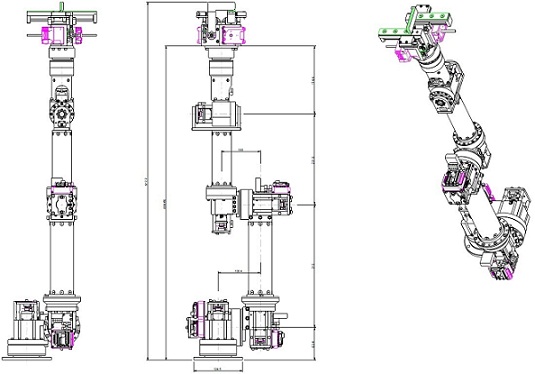
| TLArm.jpg | 46 KB | 2011/10/18 |