



Oct 18, 2013 , by
Public Summary Month 10/2013
9th Public Report:
The complete robot system is currently being integrated. The mobile column was constructed, manufactured and assembled (see Figure 3). It is capable of carrying the two robot arms, their controllers and powers supplies. The construction is very solid designed (over 250 Kg) and with the centre of gravity being located very low over the ground to prevent it from tilting over. The power supplies etc., the controllers, cameras and emergency chain components have been integrated in the column. Also a switch was integrated to reduce the number of Ethernet cables going from the control pc to the robot column.
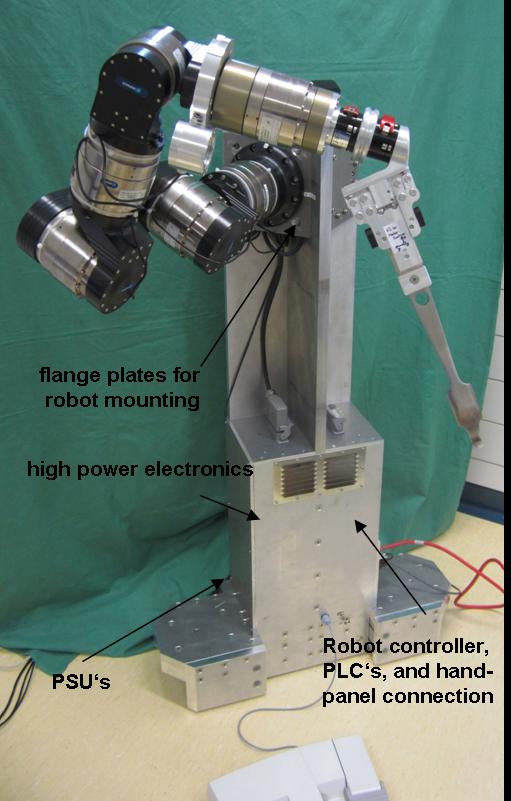
Figure 1: Mobile robot column with the location of the integrated components shown.
The new gripper (for the construction see report no. 8) was manufactured (see Figure 1). To allow the retractor to be coupled to the robot, a retractor adaptor was manufactured that also carries the ALVAR marker. The retractor adapter can be mounted on a standard medical retractor. The gripper allows a fast coupling of the retractor.
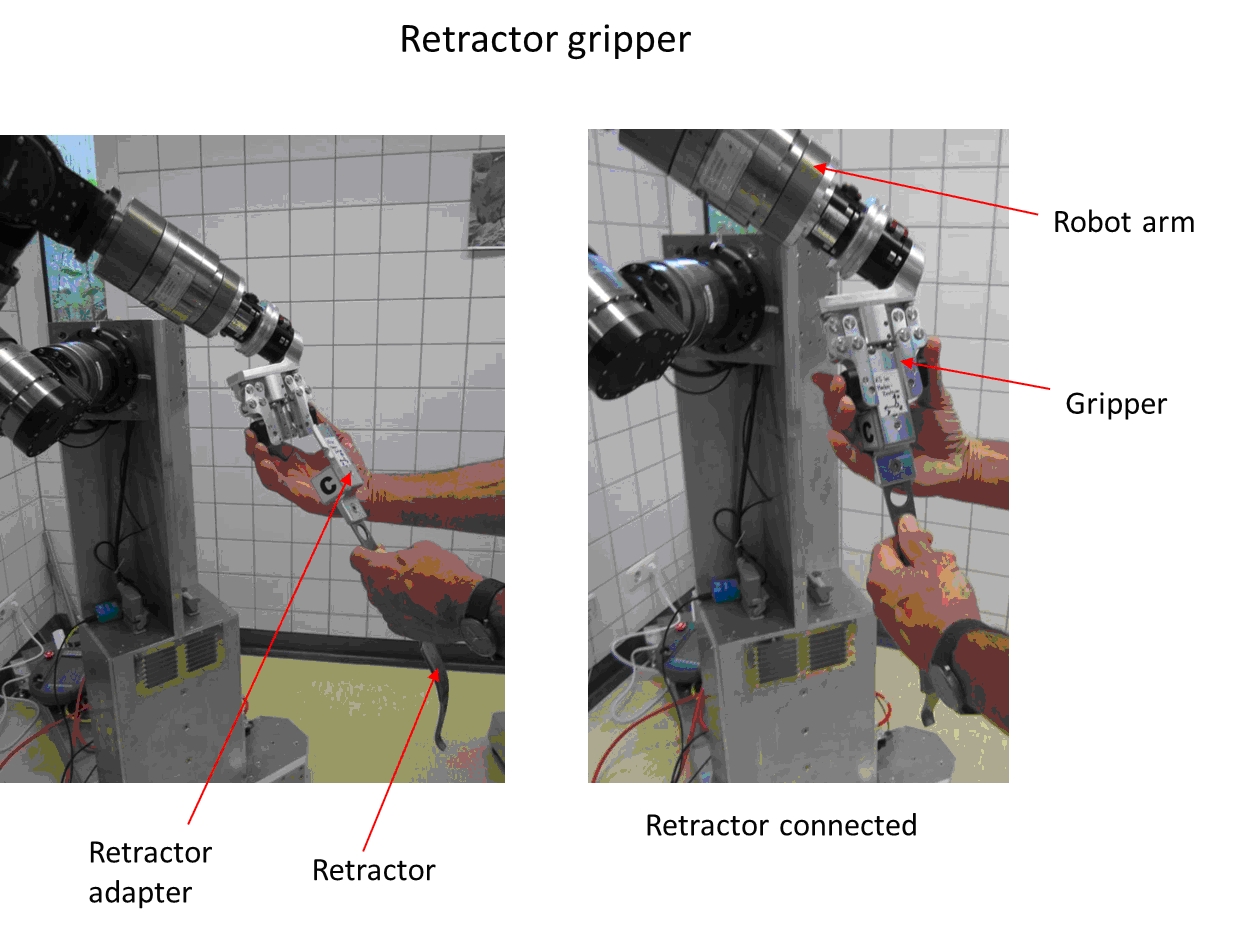
Figure 2: On the left side the retractor with retractor adapter and ALVAR marker moved towards the gripper can be seen. On the right side the closed gripper with the retractor is shown.



