



Sep 7, 2012 , by
Public Summary Month 7/2012
Seven ECHORD summary. Project C-Kompai
During June and July 2012 our main accomplishments include:
- Development of the high-level communication of programs/modules from the C-Brain of C-Robots and the existing software of the Kompai platform from Robosoft. At this point of the project, C-Robots is ready to deploy the high-level modules of the Cognitive Brain for Service Robotics into the extended Kompai platform in our last trip to France. We will perform final tests and videos in the same week.
- Completion of the hardware adaptation on the Kompaï for the cleaning functionality. The commercial vacuum cleaner Simeo NS136 (Figure 1) was selected to be incorporated into the Kompai. To integrate the vacuum cleaner, we design an interface piece to fix it on the robot in a light way (Figure 2a), to be easy to add or remove from the platform. This piece must also support the weight of the robot, because the broom must have a rotation axle on its back in order to adapt on the ground (Figure 2b). Finally, we needed to power the broom, and connect it on a digital input to start and stop it and mount it on the robot (Figure 3). Figure 4) shows the Kompai platform with the vacuum cleaner fully incorporated.

Figure 1 Siméo NS136 vacuum cleaner or broom incorporated into the Kompai platfrom.



Figure 2. a) Interface piece; b) Broom mounted with the interface.

Figure 3. Detail of push fixation.


Figure 4. Completed Kompaï platform with the integrated broom.
Jun 11, 2012 , by
Public Summary Month 5/2012
Sixth ECHORD public summary. Project C-Kompai
During April and May 2012 our main accomplishments include:
- Development of the low-level communication of programs/modules from the C-Brain of C-Robots and the existing software of the Kompai platform from Robosoft.
- Development of the associated interfaces for the added buttons (MAP, CLEAN, and BEHAVIOUR) and screens to Kompai’s GUI (Figure 1).
- Completion of the hardware modifications on the Kompai (by Robosoft) (Figure 2).
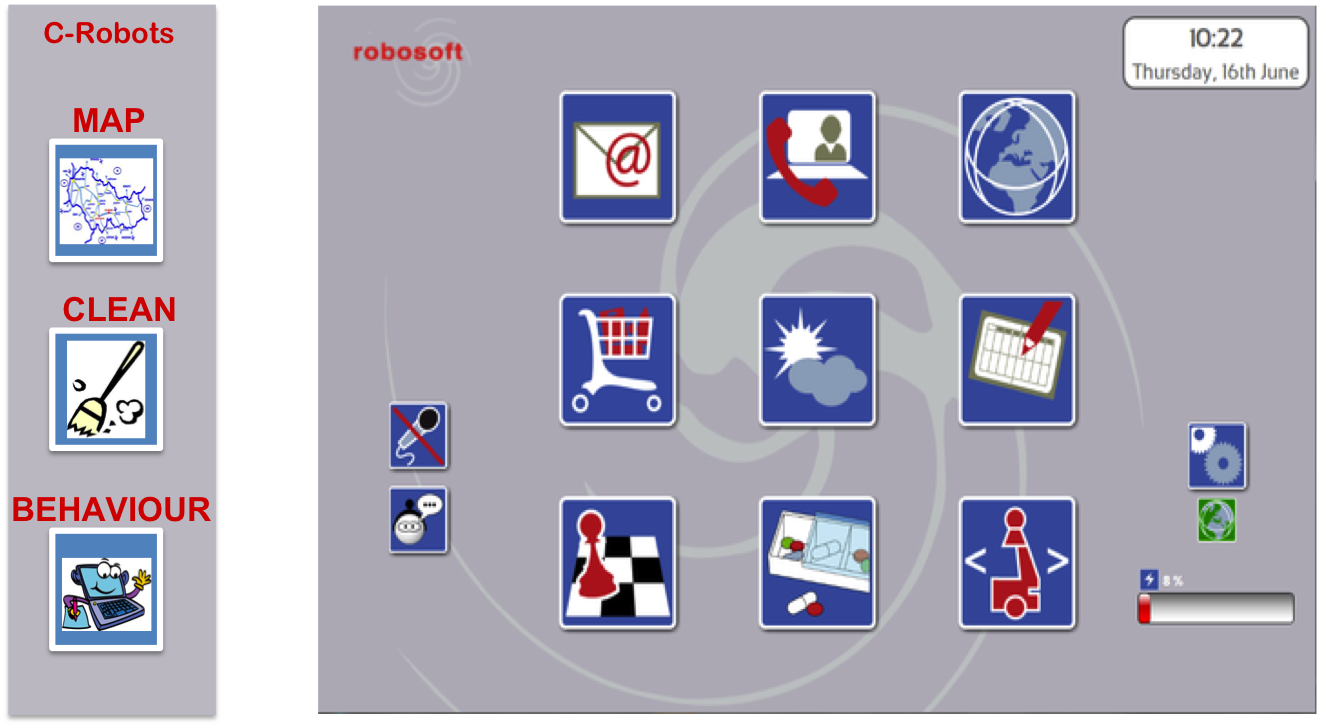
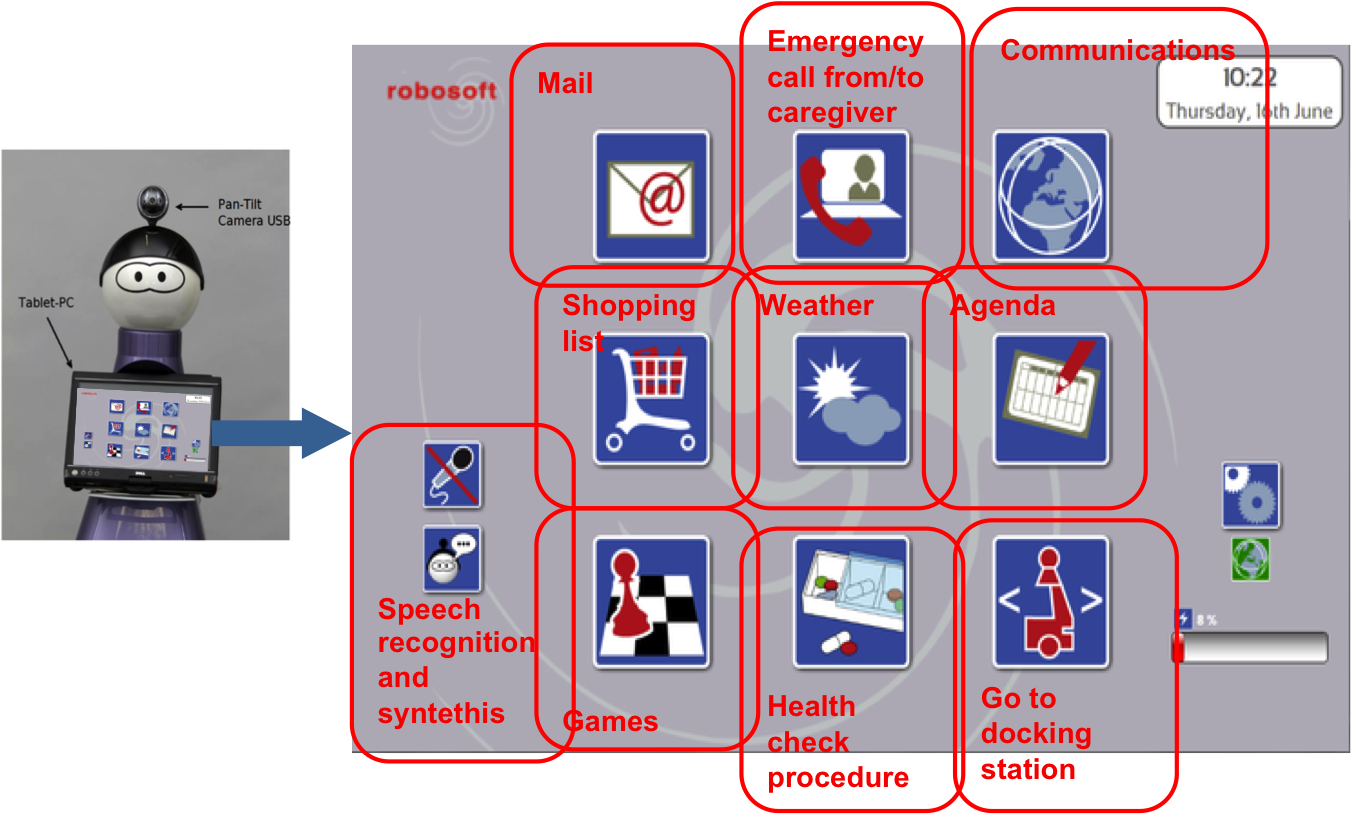
Figure 1. a) Kompai’s original GUI; b) Extended functionalities provided by C-Brain for the project.

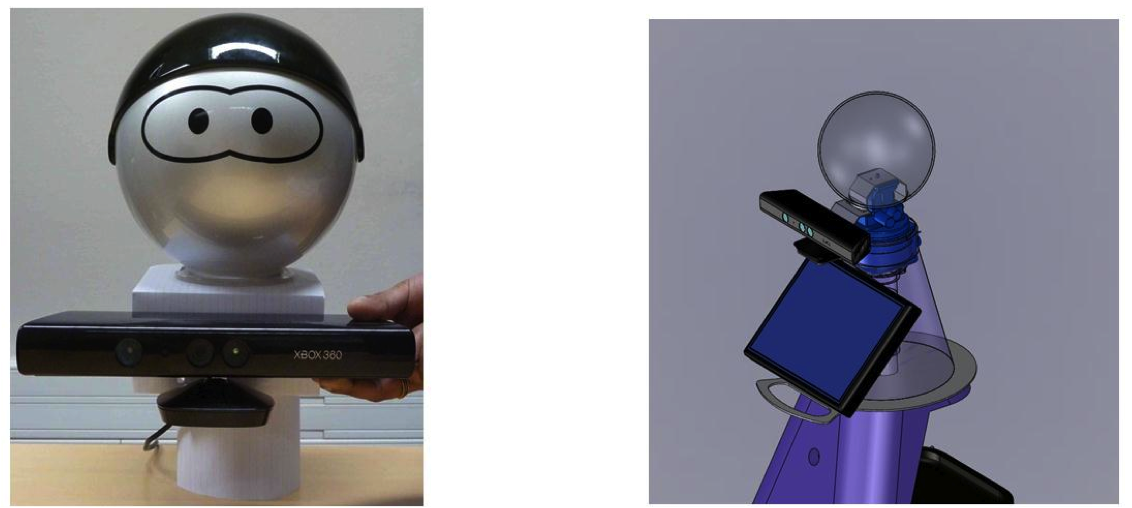
Figure 2. New hardware features added to the Kompai platform for the project: the vacuum cleaner and the 3D Kinect sensor.
At this point of the project, the software development from C-Robots is basically done. The benefits of the incorporation of the C-Brain into the Kompai platform, accomplished during this project, are the following:
1- Autonomous map creation. Before the incorporation of C-Brain into the Kompai platform, it was necessary a technician from Robosoft to create the map of a new home. With the C-Brain, the Kompai will create the new map by itself, not only the first time it arrives to a new home, but every single time the owner changes the layout of the home - without the need to call a technician again.
2- Obstacle avoidance in 3D. Before the incorporation of C-Brain, the Kompai was only able to perceive a line of the environment at the height of the laser sensor, which was very dangerous in a home environment, with a lot of obstacles at different heights. Thanks to the incorporation of the Kinect sensor, Kompai is able to perceive obstacles in 3D around the home.
3- Landmark perception/detection. Both with the laser and the Kinect sensors, the distances collected from these sensors are processed to extract the most significant landmarks of the environment (qualitative information), which will allow the robot to reason and make decisions. This is part of the patent pending, proprietary software of the “Cognitive Brain for Service Robotics” from Cognitive Robots.
4- The navigation system by Robosoft has been substituted by a more sophisticated one, which applies the ‘landmark perception/detection system’ (above) allowing the robot to reason and make further decisions.
5- Vacuum cleaning algorithms using the ‘landmark detection system’ allows the robot to know what it has done and what still needs to be done.
6- Decision making. Before the incorporation of C-Brain, Kompai has been a static robotic platform waiting for a ‘call to action’ by the user. With the incorporation of C-Brain, Kompai will be proactive and will start actions by itself to engage the user.
We are now working towards the final demonstration of the project in France.
Apr 5, 2012 , by
Public Summary Month 3/2012
Fifth ECHORD public summary. Project C-Kompai
During February and March 2012 we have created of a document describing the capabilities and behavior of the Kompai robot before and after the C-Brain of Cognitive Robots is being installed. The enhanced capabilities are added to the original Kompai GUI with three buttons (figure 1): Map creation, Cleaning, and a Proactive Behavior. It can also be accessed by voice commands.
 |
|
Figure 1. a) Kompai original GUI; b) extention functionalities provided by C-Brain for the project.
Important improvements on the Kompai platform:
- Kompai is now able to automatically create the map. Before the C-Brain installation, a Robosoft technician needed almost a full day to do the task. Any furniture of the house can now be moved around the house without any technical assistance.
- The incorporation of the 3D Kinect sensor to the platform has provided 3D obstacle detection. Before the C-Brain installation, the Kompai perception was reduced to the plane of the laser. This has been a huge improvement.
On the other hand, the vacuum cleaner is being physically integrated into the Kompai (figure 2) and the 3D Kincet sensor is being incorporated to the Kompai as well (figure 3).
|
|
 |

Figure 2. The vacuum cleaner integration into the Kompai platform.
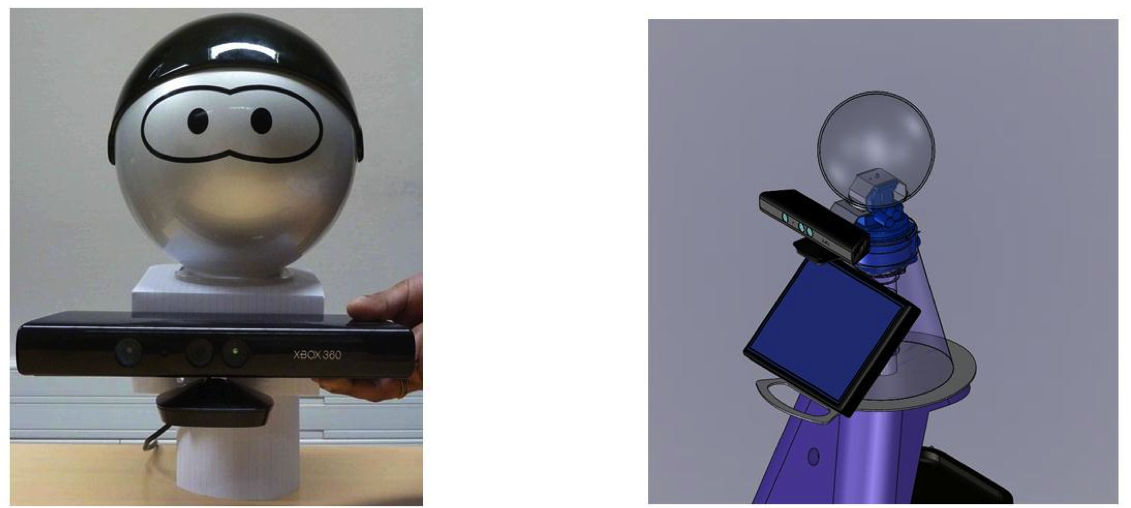
Figure 3. The 3D Kinect sensor integration into the Kompai platform.
Feb 1, 2012 , by
Public Summary Month 1/2012
Project C-Kompai
Fourth ECHORD public summary. Month of January
In these two months of development of the project (December 2011 and January 2012), the low-level modules provided by Robosoft to control the hardware of the Kompai (mainly motors and sensors) have been successfully integrated into the Cognitive Brain structure that is now in charge of the Kompai platform. The kinect sensor is completely integrated into the system as well. All the software developed or adapted so far has been tested in the Kompai’s simulator.
Other software components of the Cognitive Brain have been developed during this time, in particular, the high-level localization, the high-level global path planner, and the high-level spatial control decision maker.
Nov 28, 2011 , by
Public Summary Month 11/2011
Project C-Kompai
Second ECHORD public summary. Months of October-November
In these two months of development of the project (October and November 2011), a big improvement has taken place: the simulator for the Kompai platform, which includes the C-Brain structure, has been developed and it is now in the Cognitive Robots site. With the simulator the Cognitive Robots’ team can test all the software developed so far for the project, without the need of the physical platform in our possession. The kinect sensor adaptation to the Kompai platform has been developed at Cognitive Robots and it is ready to be installed. Robosoft is now working with the last physical feature to be added to the platform for this project: the vacuum cleaner.
Beside the development and testing of the kinect sensor integrated with the rest of the cognitive brain, several other software components of the cognitive brain have continued been developed, in particular, those related with object and scene recognition and comparison, spatial decision maker; and global path planner. And the most important fact - they are being tested in the extended Kompai simulator so that the adaptation of the software is being very efficient.



