



Apr 5, 2012 , by
Public Summary Month 3/2012
Fifth ECHORD public summary. Project C-Kompai
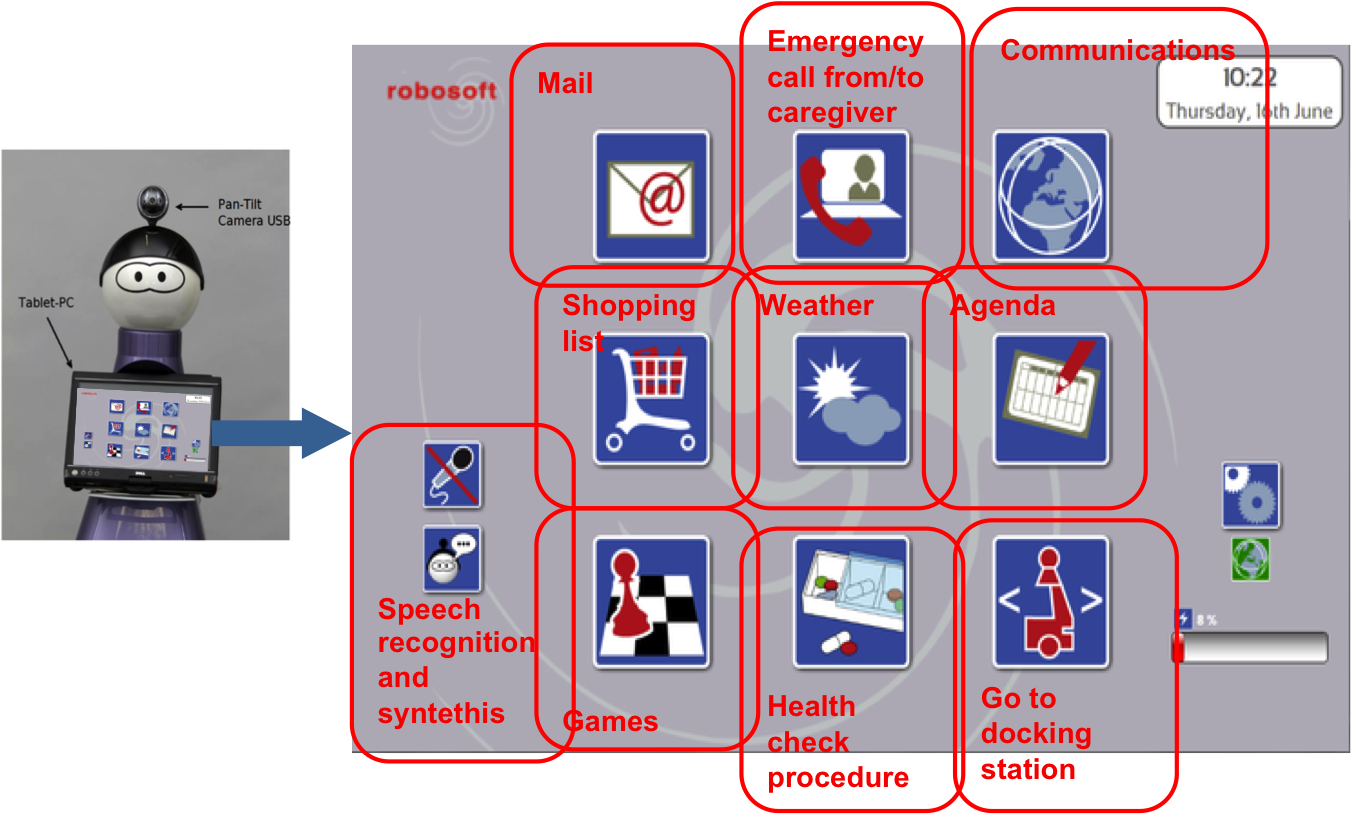
During February and March 2012 we have created of a document describing the capabilities and behavior of the Kompai robot before and after the C-Brain of Cognitive Robots is being installed. The enhanced capabilities are added to the original Kompai GUI with three buttons (figure 1): Map creation, Cleaning, and a Proactive Behavior. It can also be accessed by voice commands.
 |
|
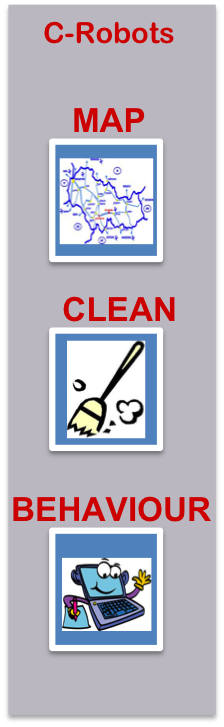
Figure 1. a) Kompai original GUI; b) extention functionalities provided by C-Brain for the project.
Important improvements on the Kompai platform:
- Kompai is now able to automatically create the map. Before the C-Brain installation, a Robosoft technician needed almost a full day to do the task. Any furniture of the house can now be moved around the house without any technical assistance.
- The incorporation of the 3D Kinect sensor to the platform has provided 3D obstacle detection. Before the C-Brain installation, the Kompai perception was reduced to the plane of the laser. This has been a huge improvement.
On the other hand, the vacuum cleaner is being physically integrated into the Kompai (figure 2) and the 3D Kincet sensor is being incorporated to the Kompai as well (figure 3).
|
|
 |

Figure 2. The vacuum cleaner integration into the Kompai platform.
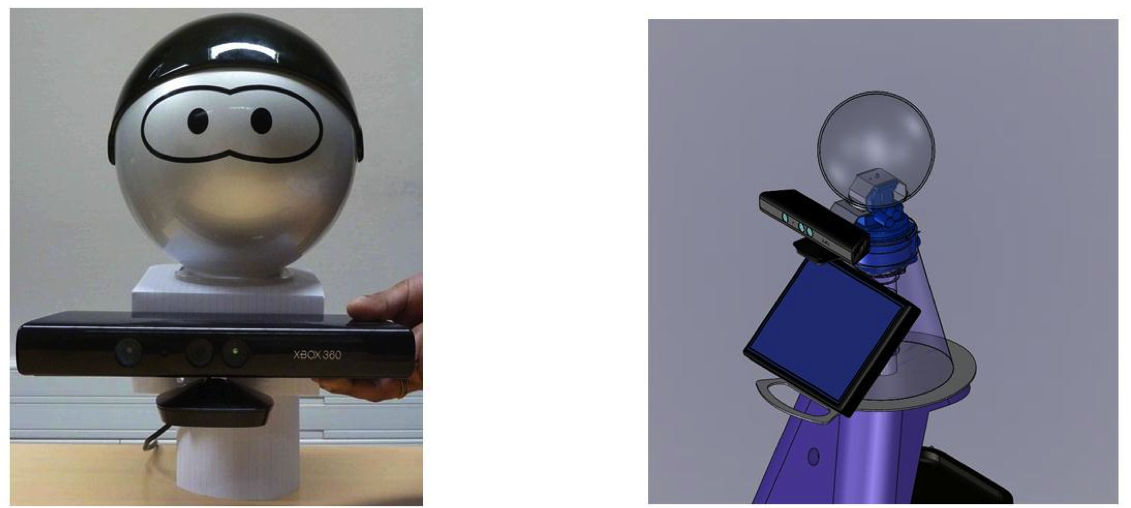
Figure 3. The 3D Kinect sensor integration into the Kompai platform.



