



Sep 19, 2011 , by
Public Summary Month 9/2011
The activities carried out during the last month are summarized as follows:
- Finalization and validation tests planning of the upper limb kinematics reconstruction algorithm.
- Testing algorithms to analyze physiological state using the information provided by the measurement of human bio-signals during the execution of virtual activities of daily living (ADL) assisted by a robotic device.
- Finalization and validation of the vibrotactile stimulation system.
- Implementation of the submovement-based control strategy on the MIT-Manus robot at UCBM.
- Implementation of autoadaptive and immersive virtual reality system.
Sep 1, 2011 , by
Public Summary Month 8/2011
The scientific activities carried out during the last two months (M7-M8) can be summarized as follows:
- Identification and implementation of the technique, suitable for MAAT project purposes, able to reconstruct human arm kinematics. It relies on the joint use of 2 magneto-inertial sensors located on the patient arm and position sensors embedded in the robot (Fig. 1).

- The system for monitoring the patient physiological state has been completed. It relies on sensors able to measure pulse, galvanic skin response, respiration and skin temperature (Fig. 2). The monitoring system has been tested on ten volunteer healthy subjects.
- Implementation in a simulated environment of a new control system grounded on a submovement-based trajectory planner that allows adapting robot accuracy and interaction force in unstructured environment (Fig. 3). A comparison with a traditional PD torque control has also been carried out.
- The effect of vibrotactile stimulation will be evaluated. We are defining the experimental protocol.
- In order to deliver motor tasks of daily living activities during the robotic therapy and motivate the patient, a virtual realty environment has been developed (Fig. 4). The system adapts the performance according to residual ability of the patient.
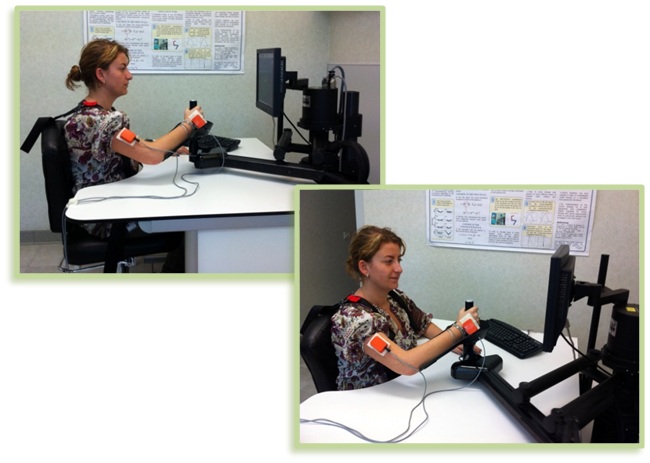
Fig.1. - Arm kinematic reconstruction set-up: the subject performs the exercise with MIT-Manus system; the magneto-inertialsensors placed on upper arm and hand measure radial acceleration and orientation respectively.

Fig.2. - Physical/coordination task (top); Cognitive task (middle); Physical/coordination + Cognitive task (bottom)
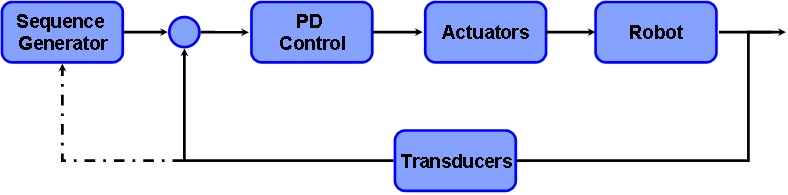
Fig.3. - Block scheme of the control based on submovement composition
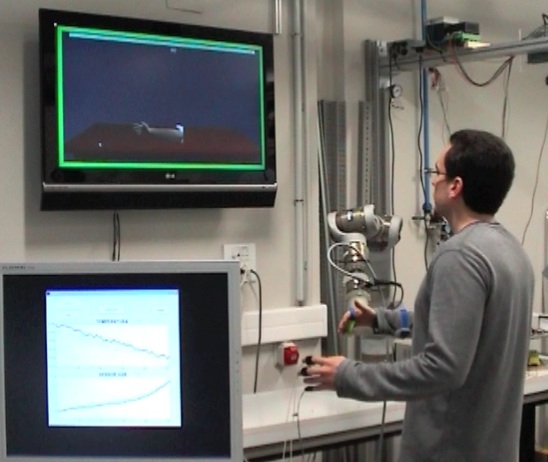
Fig.4. - The Virtual Reality environment reproducing activities of daily living



