



Jul 31, 2012 , by
Public Summary Month 7/2012
The last projects phase comprises of finishing the experiment setup (Task 5), the experiment conducting and analysing (Task 6 and 7).
To enhance the usability and safety of the manual guiding of the robot a new input device was developed and implemented to the robot system. With this joystick a user-friendly guiding of the robot is possible. Inside the two handles of the joystick capacity sensors recognizes if the user has grasped the two handles with both hands. With the red button the user can then start the guided robot motion and with the green button the positions of the trajectory will be stored.
The joystick can be quickly mounted to the end-effector of the robot in different positions with a quick release skewer. This is necessary for an easy programming of the reconfiguration and of any individual handling task. The robot movement is realized by processing the data of the force-torques sensor induced by the user with the joystick.
Finally a complete reconfiguration task of the passive kinematics was successfully realized with the scenario of gripping different car exhausting pipes which will be presented in the final video.
Jun 13, 2012 , by
Public Summary Month 5/2012
In the past reporting period a new force torque sensor with enhanced force range was integrated to the system. The gravity compensation and the error correction were then adapted to the new sensor properties (weight, size etc.). Finally the algorithm for the manual guiding of the robot with the sensor is realized. The user can easily grasp the tool and move it to the new position while the robot stores all positions in the program. This is a simple and user friendly procedure for teaching the reconfiguration and handling tasks with the robot.
Apr 2, 2012 , by
Public Summary Month 3/2012
The first reconfiguration procedure of the passive gripping kinematic with force torque control was realized with the KUKA robot and the RSI interface: The inertial straight line path in y-direction of the robot could be automatically adapted to a force/torque controlled circular movement (see figure 1). The measured forces and torques of the experiment are diagrammed in the following figure 2. The algorithm for force compensation has been proved and works well.

Figure 1: test scenario with force controlled robot path


Figure 1: forces (left) and torques (right) during the controlled robot movement
The changing influence of the gravitational force of the passive arms is seen in the Y component of the measured forces and in the X component of the torque. There are some problems with the operating range of the force torque sensor: In some cases the reaction forces of the passive kinematic are higher than the maximum load force of the sensor. In the first step the grippers will be equipped with force absorbers to avoid force limitations during further tests. The second step is the exchange of the force torque sensor with a sensor with higher force range. The overall work progress of the experiment is without delays. Task 5 and 6 are currently in process.
Jan 31, 2012 , by
Public Summary Month 1/2012
The work progress of the experiment is according to the work plan without any significant delays. The setup of the test arrangement (Task 5) is currently under construction. Therefore the passive arms are mounted at the clamping table and connected pneumatically and electrically. The layout and the gripper fingers are designed for the handling of 3D tubes.
The force-torque sensor is mounted to the robot together with the clamping device for the self-reconfiguration of the passive arms and also with some additional handling grippers. The sensor for the real-time manipulation of the robot path during reconfiguration was successfully installed and tested. For this testing the robot could be controlled with the sensor by using it as a manual guiding device.
The weights and centres of mass of all articulated components were determined and stored in a MATLAB routine to eliminate undesired mass effects of the sensor values. The next step will be the testing of the first simple reconfiguration procedure. Therefore the sensor guided reconfiguration algorithm will be implemented. The next report will present results and pictures of the first reconfiguration procedure.
Dec 12, 2011 , by
Public Summary Month 11/2011
The completion of Deliverable DHyropa2 was aim of the last reporting period since September 2011 (Task 2). The IFF has therefore revised the passive gripping arms and the additional equipment (e.g. hydraulic system for clamping). The gripping arms were tested and adjusted to the maximal intended loads and forces of the validation scenario. The single components are now disposed for the following combination in the work cell.
The current work is related to the automatically path planning (Task 3) and the force compensation (Task 4). Parallel to this work the scenario setup “manipulation of 3D formed tubes” for the validation will be prepared using simulation (Task 5; figure 1). The arms are holding different tubes (e.g. car exhaust pipes) for applying manipulation tasks (e.g. flange welding, trimming, labelling). The most critical points for the validation tests are the necessary reachability and flexibility of the arms, which have to match with the scenario demands.
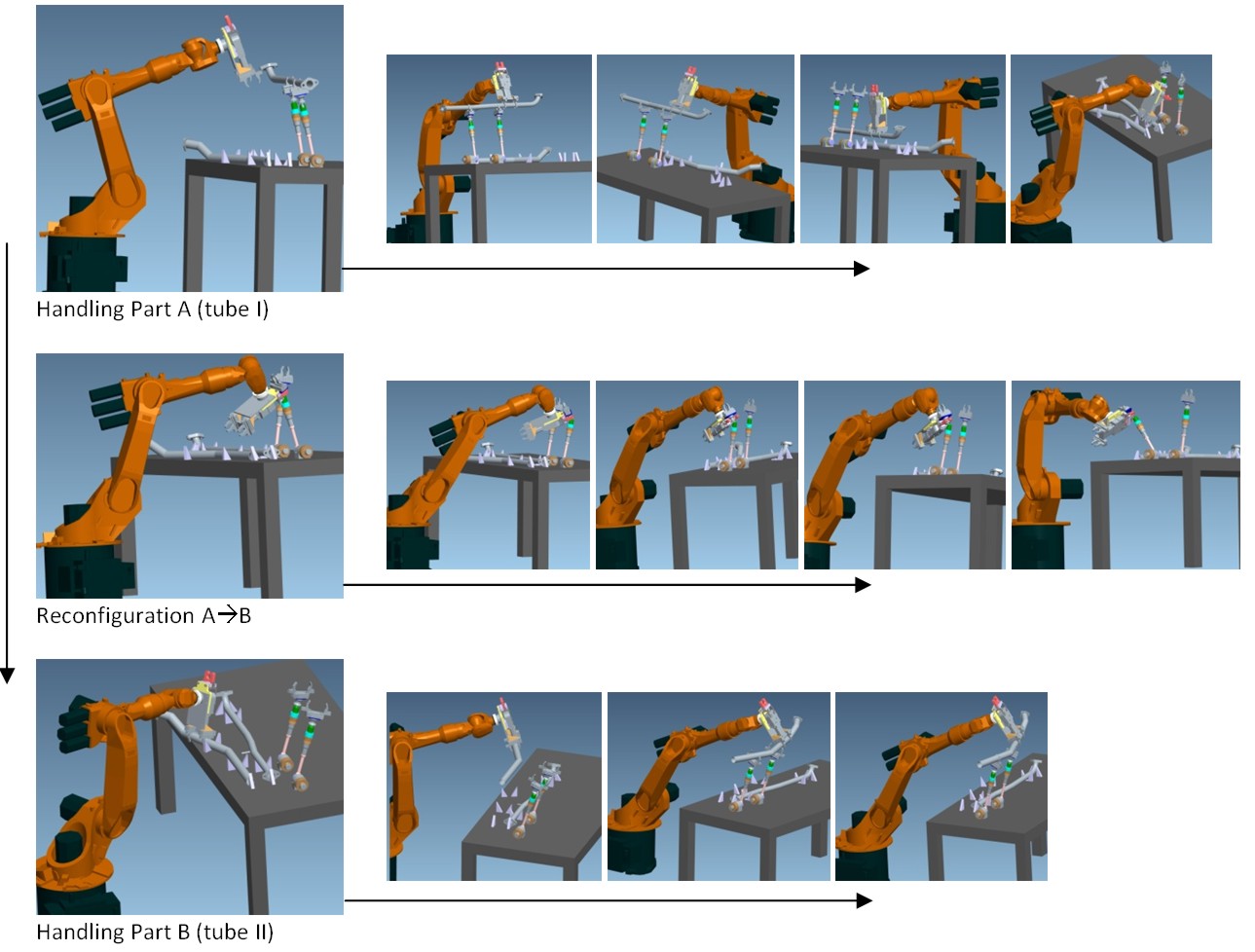
Figure 1: simulation of the test scenario



