



Dec 12, 2011 , by
Public Summary Month 11/2011
The completion of Deliverable DHyropa2 was aim of the last reporting period since September 2011 (Task 2). The IFF has therefore revised the passive gripping arms and the additional equipment (e.g. hydraulic system for clamping). The gripping arms were tested and adjusted to the maximal intended loads and forces of the validation scenario. The single components are now disposed for the following combination in the work cell.
The current work is related to the automatically path planning (Task 3) and the force compensation (Task 4). Parallel to this work the scenario setup “manipulation of 3D formed tubes” for the validation will be prepared using simulation (Task 5; figure 1). The arms are holding different tubes (e.g. car exhaust pipes) for applying manipulation tasks (e.g. flange welding, trimming, labelling). The most critical points for the validation tests are the necessary reachability and flexibility of the arms, which have to match with the scenario demands.
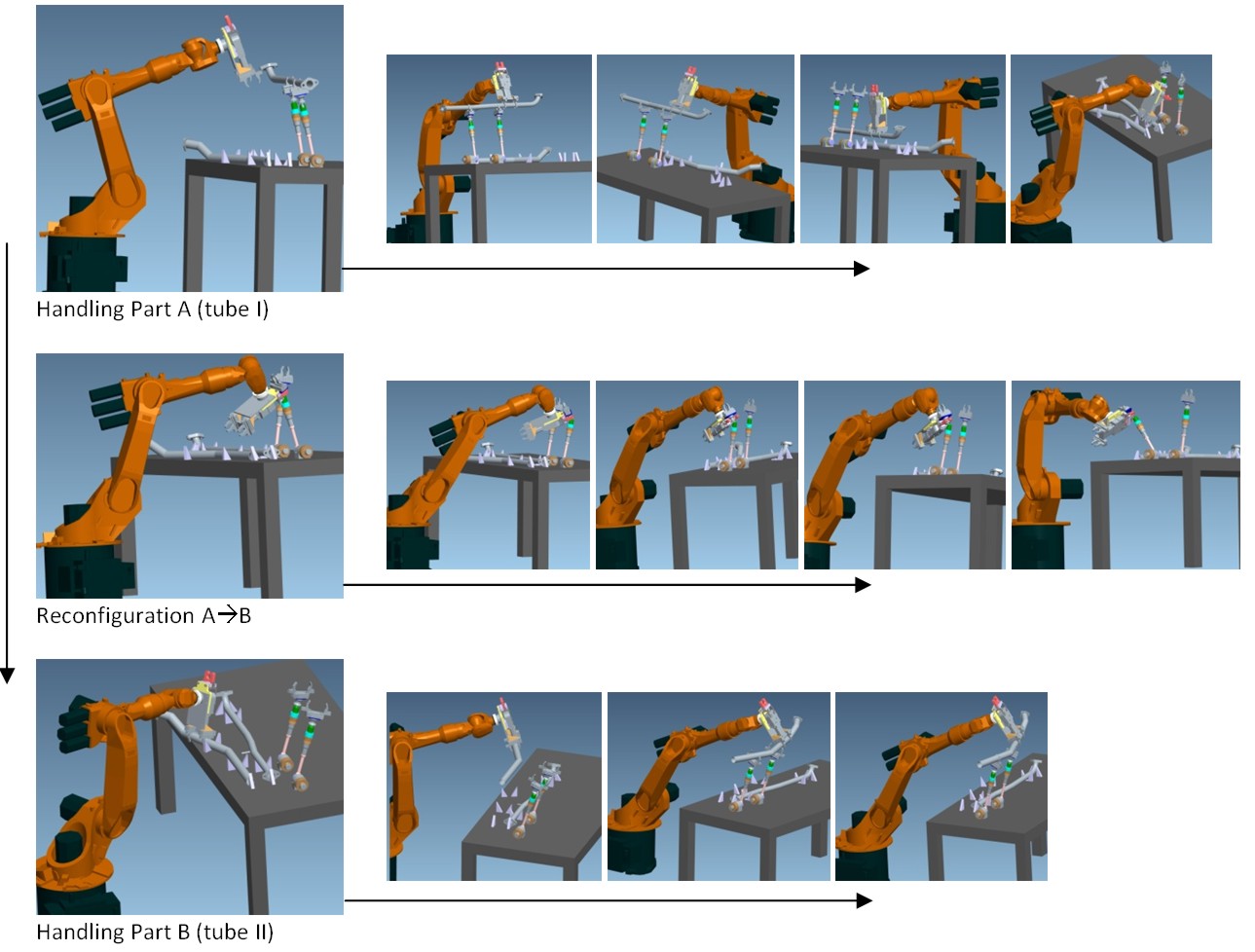
Figure 1: simulation of the test scenario



