



Aug 24, 2012 , by
Public Summary Month 7/2012
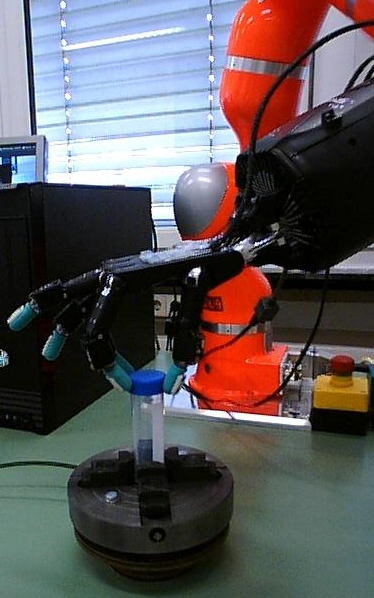 To make a representative evaluation of the various grasps we have built a platform with a holding device for the objects that had used during the experiments. Integrated into this platform is a force torque sensor. If we now clamp a object to the platform and grasps it we can evaluate this grasp by measuring how much force can be exerted on the object.
To make a representative evaluation of the various grasps we have built a platform with a holding device for the objects that had used during the experiments. Integrated into this platform is a force torque sensor. If we now clamp a object to the platform and grasps it we can evaluate this grasp by measuring how much force can be exerted on the object.
This is especially important to find out if it is possible that a given grasp can prvide the required torque to unscrew the lid of a container. Also it may allows a general assessment of the grasps when looking at all forces.
Jun 11, 2012 , by
Public Summary Month 5/2012
 The hand with the new biotac sensors has arrived in Hamburg. These sensors provide a much more precise presentation of the contact points of the fingers and the grasped objects. There are 19 different values per finger which each represents a point on the surface of the sensors. As you can see in the picture these points are close enough to each other so that we can approximate the position of the object without using the visual system.
The hand with the new biotac sensors has arrived in Hamburg. These sensors provide a much more precise presentation of the contact points of the fingers and the grasped objects. There are 19 different values per finger which each represents a point on the surface of the sensors. As you can see in the picture these points are close enough to each other so that we can approximate the position of the object without using the visual system.
May 4, 2012 , by
Public Summary Month 3/2012
A new GUI
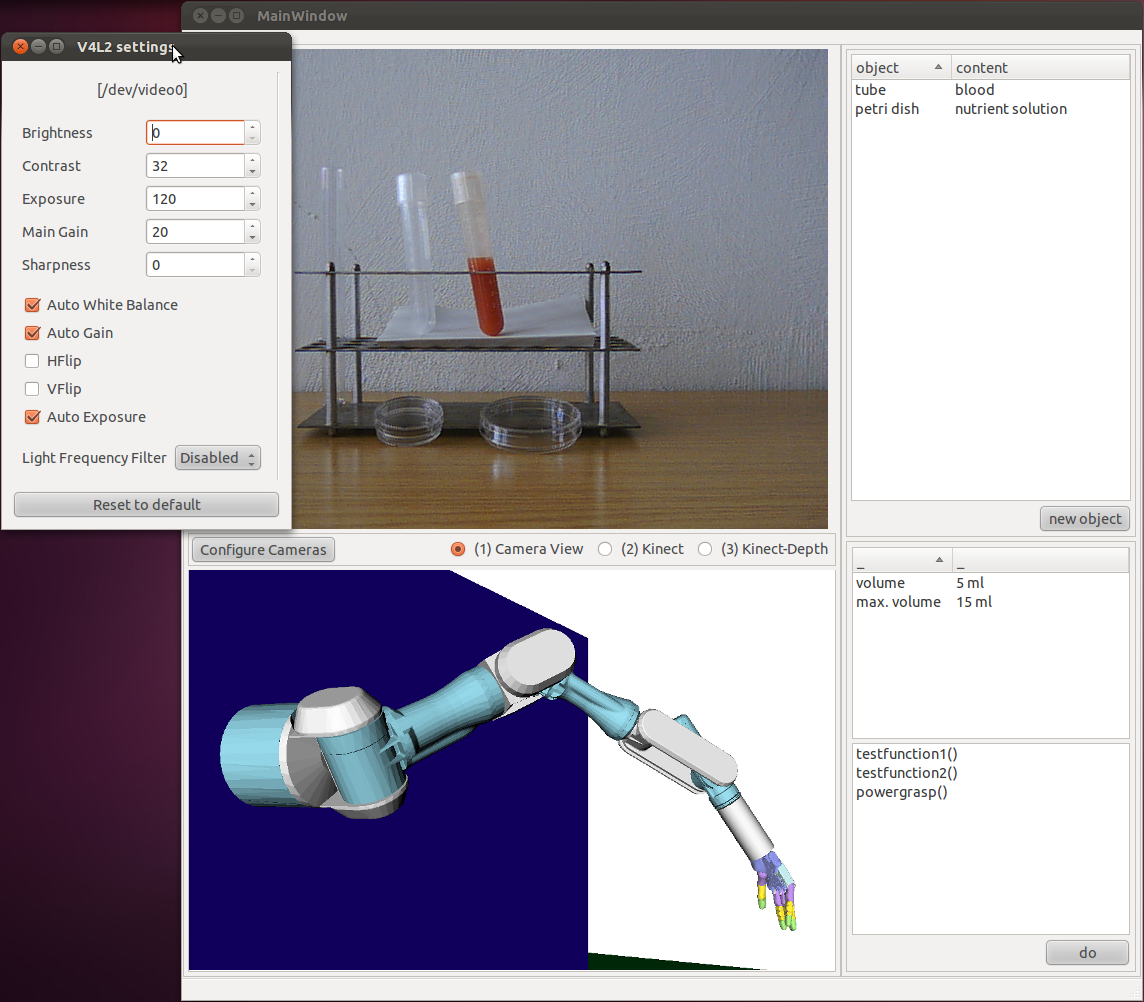
The first version of a graphical user interface has been implemented.
The constellation of the system could be read out by a rgb-camera view
or by the views of the Kinect (rgb- and depth-image) as well as in the simulation view of OpenRAVE and some additional information that is provided like a list of the known objects and there content. To create the GUI we decided to use Qt. This is a cross-platform application framework which provides a quite intuitive way to this.
Feb 15, 2012 , by
Public Summary Month 1/2012
 The first feasibility tests are completed and we were able to realize the main tasks. We hope to solve the problems that we have discovered by improving the control (high level control) and by a few upgrades of the hand.
The first feasibility tests are completed and we were able to realize the main tasks. We hope to solve the problems that we have discovered by improving the control (high level control) and by a few upgrades of the hand.
Next we have agreed on two scenarios that will be the targets for our further work. The first is the pipette of liquid including the full operation of the pipette such as adjusting the volume wheel (see picture). The second scenario is a special case in which a liquid is injected into a chicken egg. This is normally done for example to multiply bacteria.
Dec 4, 2011 , by
Public Summary Month 11/2011
The first steps of the project has been made. The scenarios include the handling of different containers, pipettes, injection as well as an egg. An environment for the experiments was created. When creating the design we considered that unexpected behaviors will not damage the hardware. Now the feasibility of the scenarios is being tested and the software used by the project partners has to be embed.



