



Aug 24, 2012 , by
Public Summary Month 7/2012
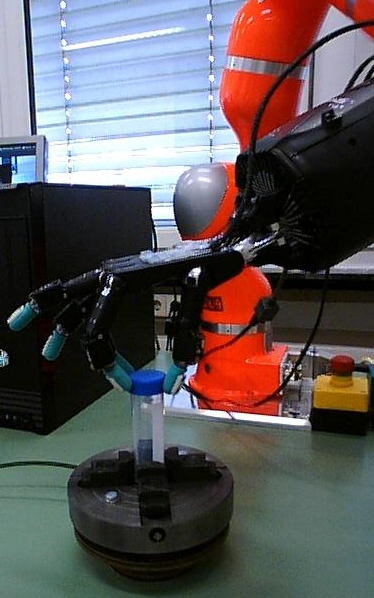 To make a representative evaluation of the various grasps we have built a platform with a holding device for the objects that had used during the experiments. Integrated into this platform is a force torque sensor. If we now clamp a object to the platform and grasps it we can evaluate this grasp by measuring how much force can be exerted on the object.
To make a representative evaluation of the various grasps we have built a platform with a holding device for the objects that had used during the experiments. Integrated into this platform is a force torque sensor. If we now clamp a object to the platform and grasps it we can evaluate this grasp by measuring how much force can be exerted on the object.
This is especially important to find out if it is possible that a given grasp can prvide the required torque to unscrew the lid of a container. Also it may allows a general assessment of the grasps when looking at all forces.
Tags:
public summary



