



Jul 31, 2012 , by
Public Summary Month 7/2012
During the present monitoring period, the following research activities within the HUROBIN experiment were carried out:
- Low level control of the servo motors in the Simulink scheme was improved, along with S-function including communication processes using the USB-CAN interface.
- Analysis of the robotic arm’s compliance based on data from the JR3 force/torque sensor was completed. A new set of reference angles for each motor was computed using the Jacobian matrix.
Task 3 "Design and development of control strategy for the robotic platform" represent an ongoing activity aimed at achieving Milestone M3 “Implementation of a control strategy for the cooperative task” which will be presumably achieved on month 42. Task 6 "Dissemination" represents an ongoing research activity as well.
Jun 1, 2012 , by
Public Summary Month 5/2012
During the present monitoring period the following research activities within the HUROBIN experiment were carried out:
- Dataglove, motion tracker and JR3 force/torque sensor integration. The two Matlab S-functions for UDP communication with tracker and dataglove were implemented and integrated in a unique Simulink scheme, including S-function for managing JR3 force/torque sensor placed on the wrist joint.
- Low level control of the servo motors in the above mentioned Simulink scheme was implemented, along with S-function including communication processes using USB-CAN. The low level communication of the servo motors for implementing an impedence-based control was analyzed.
Task 2 "Dataglove and tracker integration with robotic arm" is completed: Milestone M2 “Dataglove and tracker integration with robotic arm” is achieved. Task 3 "Design and development of control strategy for the robotic platform" represent an ongoing activity aimed at achieving Milestone M3 “Implementation of a control strategy for the cooperative task” (expected on month 43). Task 6 "Dissemination" is ongoing as well.
Apr 6, 2012 , by
Public Summary Month 4/2012
During the present monitoring period the research activities carried out within the HUROBIN experiment can be divided into the following phases:
- Experimental tests of the MATLAB S-function including communication part (open, initialize and close IXXAT USB-CAN compact device communication) and low-level control of servo-motors (start motors, low- level position control of the joints, velocities setting, motors stopping, motors braking). New functionalities, such as output of current values and motors positions, were also added.
- Final testing of the embedded MATLAB function “Damped Least Square for inverse kinematics” for tuning parameters, including analysis and solution of possible “worst cases”.
- Data acquisition from Motion tracker and Dataglove.
The experimental setup is shown in Figure 1.
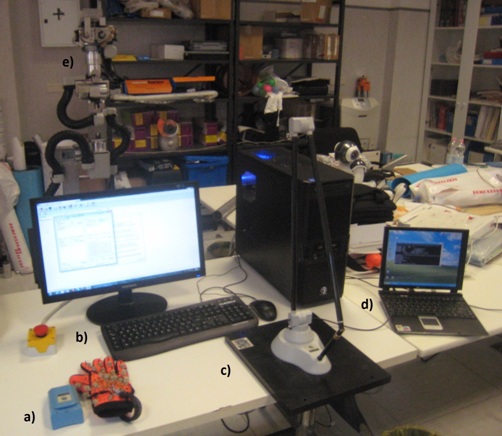
Figura 1. The experimental setup: a) Dataglove, b) Control desktop PC, c) Motion tracker, d) Communication laptop PC, e) Robotic platform
Task 2 "Dataglove and tracker integration with robotic arm" and Task 3 "Design and development of control strategy for the robotic platform" represent ongoing activities aimed at achieving Milestone M2 “Dataglove and tracker integration with robotic arm”. Task 6 "Dissemination" is ongoing as well.
Jan 27, 2012 , by
Public Summary Month 1/2012
During this monitoring period, the research activities carried out within the HUROBIN experiment have focused on (1) the implementation of software solutions for controlling the robotic platform at low level and (2) the validation tests for collecting data from the force/torque sensor positioned at the robot’s end-effector.
Current research tasks are addressed to (1) the integration of dataglove and motion tracker with the robotic platform and arm and (2) the design and development of control strategy for safe human-robot interaction.
Nov 29, 2011 , by
Public Summary Month 11/2011
During this monitoring period the research activities of the HUROBIN experiment can be divided in two phases:
- Setup of the robotic arm (Figure 1) and tests;
- Design of control strategies for human-robot cooperative tasks.

Figure 1. The HUROBIN robotic arm



