



Apr 6, 2012 , by
Public Summary Month 4/2012
During the present monitoring period the research activities carried out within the HUROBIN experiment can be divided into the following phases:
- Experimental tests of the MATLAB S-function including communication part (open, initialize and close IXXAT USB-CAN compact device communication) and low-level control of servo-motors (start motors, low- level position control of the joints, velocities setting, motors stopping, motors braking). New functionalities, such as output of current values and motors positions, were also added.
- Final testing of the embedded MATLAB function “Damped Least Square for inverse kinematics” for tuning parameters, including analysis and solution of possible “worst cases”.
- Data acquisition from Motion tracker and Dataglove.
The experimental setup is shown in Figure 1.
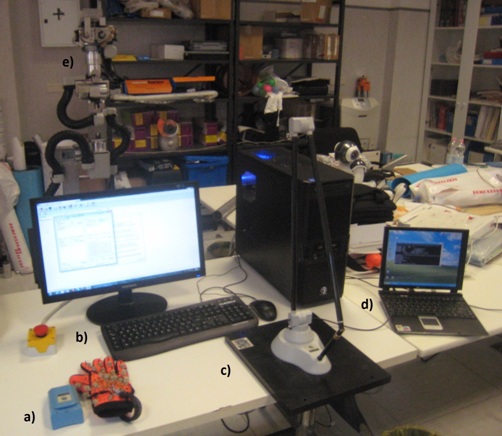
Figura 1. The experimental setup: a) Dataglove, b) Control desktop PC, c) Motion tracker, d) Communication laptop PC, e) Robotic platform
Task 2 "Dataglove and tracker integration with robotic arm" and Task 3 "Design and development of control strategy for the robotic platform" represent ongoing activities aimed at achieving Milestone M2 “Dataglove and tracker integration with robotic arm”. Task 6 "Dissemination" is ongoing as well.
Tags:
public summary



