



Jul 27, 2012 , by
Public Summary Month 7/2012
As this is the last report of the EXECELL experiment we present the successful completion of the project. In this reporting period we finished Task 8 and Task 9, thus finally reaching the last milestone M3.
In Task 8 we analyzed the system behavior and identified the limitations of the detection capabilities of the sensor system by using various test criteria elaborated on basis of the Technical Report IEC 61496-4. So, the evaluation of the system represents first insights regarding a future safety certification and its feasibility. Beside the analysis of the response time, especially the examination of object properties and their influences to the detection capabilities were involved.
Task 9 handles the implementation and execution of the use cases defined in Task 2. Here, the focus was on using both safety space calculation approaches, the global one and the dynamic one.
Jun 1, 2012 , by
Public Summary Month 5/2012
The main task in this reporting period was the preparation and exhibition of the EXECELL project at hall B3, booth 510 of the Fraunhofer IFF at the 5th International Trade Fair for Automation and Mechatronics AUTOMATICA from 05/22 – 05/25/2012 in Munich (see Figure 1).
Therefore we spend a lot of time for debugging and testing the overall system and further implemented two scenarios. The first one comprises an infinite loop of three movements of the KUKA Lightweight robot while the safety space is dynamically adapted all the time. Before the motion of the robot we additionally visualized on the one hand its intended moving direction and on the other hand the destination position accordingly. The second scenario was quite more complex. Here, we presented human-robot cooperation by depositing and detecting an object in a transfer-station and further grasping and placing it to a predefined position on the workbench. All time the safety space was dynamically adapted and additional information for guiding the operator was displayed.
Concerning Task 8 we completed the elaboration of test criteria and purchased relevant test pieces of different sizes and colors. On basis of this we started the evaluation of the system behavior, which is still in progress.
Figure 1: EXECELL project at Fraunhofer IFF booth at AUTOMATICA.
Apr 3, 2012 , by
Public Summary Month 3/2012
In the end of March the project participants had a meeting at the Fraunhofer IFF in Magdeburg to present the current state of the experiment. Here, we implemented a simple pick and place scenario to demonstrate the functionality of the overall system under operating conditions.
Concerning Task 6, the focus was on integrating the developed software components into a working complete system. Therefore, from the beginning we capsuled the algorithms into services to offer the opportunity of individually use and compose them with other existing services. This enables us to easily build up the complete software system. Another part of Task 6 concerns the calibration of robot and sensor system to a common coordinate system. At first we calibrated the sensor system by using a single chessboard pattern to measure the poses of the surrounding cameras. The projector’s pose is determined by projecting specified patterns on a defined projection plane, which are detected by the calibrated cameras. For calibrating the robot we developed a semi-automatically method. Here, we project single small dots to the expected axis positions of the robot and refine its estimated pose iteratively.
In Task 7 the project participant KUKA is still processing the work of adapting their path planning algorithms. Here, we used the sensor system as a light section sensor to acquire a 3-dimensional reconstruction of the scene, which will be further used to calculate collision free paths of the robot.
Jan 27, 2012 , by
Public Summary Month 1/2012
At the end of this month the project participants have finished both the processing of Task 4 and Task 5. Furthermore, in this reporting period we started the work on Task 6 to simultaneously test the developed algorithms under operating conditions.
Besides the receiving of the current robot’s state, we also enabled the system to control the robot by usage of FRI (Fast Research Interface). Furthermore, we finished the extension of algorithms for 3D safety volume generation and collision test. Here, we adapted and implemented algorithms to generate the safety spaces in two ways. On the one hand, the safety space can be generated in order to comprise all positions of the robot, moving on a predefined trajectory. On the other hand, the safety space is dynamically adapted to the current robot state at any time. In figure 1 are both the online and offline approach depicted.
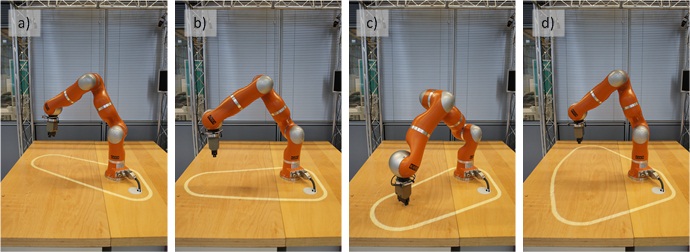
Figure 1: a) –c) Dynamic generation of the safety space by using the current robot state.
d) Offline safety space generation on the basis of a predefined trajectory.
Nov 25, 2011 , by
Public Summary Month 11/2011
In the current reporting period the project participants started in October with the processing of Task 4 and Task 5. At this time we finished a major objective of Task 4 by generating a virtual physical model of the KUKA LWR and by implementing main components of the interface between the LWR control and the software system. In Task 5 we are further working on the optimization and adaption of the real-time algorithms used on the one hand to calculate safety volumes and on the other hand to detect potential collisions.



