



Jan 27, 2012 , by
Public Summary Month 1/2012
At the end of this month the project participants have finished both the processing of Task 4 and Task 5. Furthermore, in this reporting period we started the work on Task 6 to simultaneously test the developed algorithms under operating conditions.
Besides the receiving of the current robot’s state, we also enabled the system to control the robot by usage of FRI (Fast Research Interface). Furthermore, we finished the extension of algorithms for 3D safety volume generation and collision test. Here, we adapted and implemented algorithms to generate the safety spaces in two ways. On the one hand, the safety space can be generated in order to comprise all positions of the robot, moving on a predefined trajectory. On the other hand, the safety space is dynamically adapted to the current robot state at any time. In figure 1 are both the online and offline approach depicted.
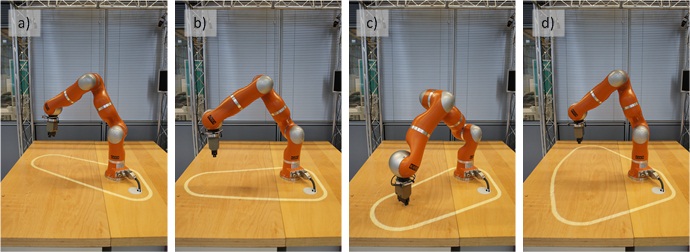
Figure 1: a) –c) Dynamic generation of the safety space by using the current robot state.
d) Offline safety space generation on the basis of a predefined trajectory.



