



Jul 25, 2011 , by
Public Summary Month 7/2011
The first experimental session with real elderly people was performed in order to confirm and define the appearence and the mechanical structure of the mobile robotic platform with criteria of acceptability and usability. The first phase of the smart environment setup started in the DomoCasa Living Lab, with the production of twenty boas to be installed in the environment.
May 31, 2011 , by
Public Summary Month 5/2011
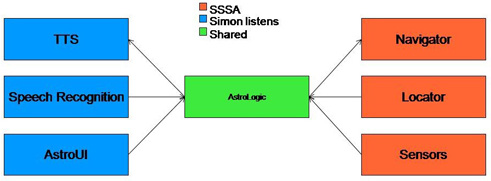
The integration of the software architecture of ASTRO robot was performed and implemented over the D-Bus interface. Functionalities were developed considering acceptability and usability criteria.
Mar 30, 2011 , by
Public Summary Month 3/2011
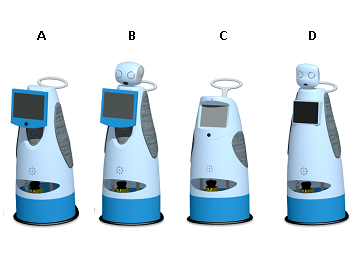
The development of ASTROMOBILE, as an assistant in domestic environments, is more and more devoting and taking care on the production and implementation respectively of a friendly, advanced and effective interface and behaviour, in order to reach an high level of usability and acceptability by end-users. Three main research line have been investigated in these last months: 1) the design of a physical cover with appropriate appearance and functionalities, 2) the integration with a smart environment infrastructure to improve the navigation of the robot, and 3) the implementation of an multimedia infrastructure for speech recognition and vocal synthesis tools.
Jan 31, 2011 , by
Public Summary Month 1/2011
Since the ASTROMOBILE proposal is focused on the development and deployment of a smart robotic assistive platform for services, such as communication, reminder functions, monitoring and safety, useful to the well-being of humans or equipments, the issues of localization in smar environments by means of ZigBee sensor network, navigation in largely unstructured environments, interaction with natural interfaces and design for acceptability and usability were faced.



