



May 31, 2011 , by
Public Summary Month 5/2011
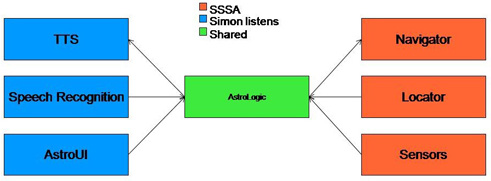
The integration of the software architecture of ASTRO robot was performed and implemented over the D-Bus interface. Functionalities were developed considering acceptability and usability criteria.
Tags:
public summary



