



Dec 27, 2011 , by
Public Summary Month 12/2011
During the last two months we focused on the following aspects.
• Mapping algorithms with the DLR-HIT II hand. In particular we implemented joint to joint mapping, while fingertip mapping and the proposed virtual sphere mapping are ongoing activities.
• Calibration and tests of the sensorized object. In the current version the system can acquire the contact force vector and position on any surface of the object.
Oct 27, 2011 , by
Public Summary October 2011
During the last two months we focused on the following aspect.
• The algorithm for mapping human synergies onto robotic hands with dissimilar kinematic structures has been tested through several simulation with a three fingers eight joints fully actuated hand model. In particular, improvements with respect to existing in literature mapping algorithm have been demonstrated.
• The DLR-HIT II hands has been installed at UNISI. Major functionalities of the hand and the user interface have been tested. The implementation of our mapping procedure in this robotic hand has started.
• The hardware of the instrumented object which consists of the instrumented core sensors and the electronics has been completed. Calibration, testing and software development have progressed significantly and are ongoing activities.

The DLR-HIT II hand @ UNISI
Oct 18, 2011 , by
Public Summary Month 10/2011
The DLR-HIT II hand is finally arrived in our Lab!!!

Jul 30, 2011 , by
Public Summary Month 7/2011
In the last two months the work of the HANDS.DVI partners has been focused on
• designing the algorithm of mapping synergies from the paradigmatic hand, the model of the human hand, to robotic manipulators with general kinematics
• realizing the experimental setups to be used in the next period of the project to validate the project results of HANDS.DVI.
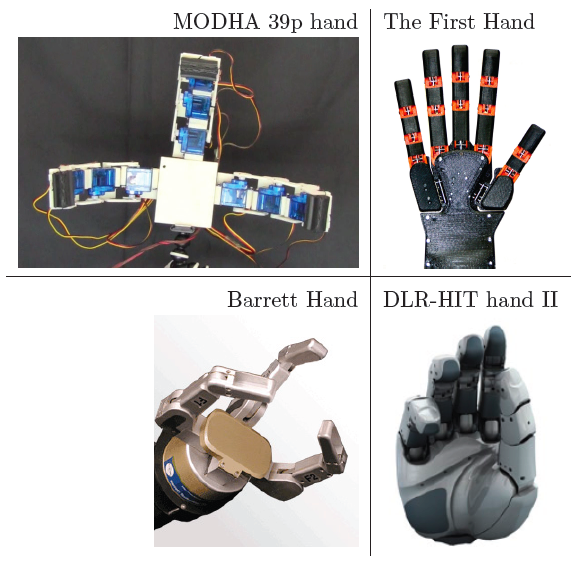
Note that for the experimental setup we planned to use a DLR-HIT hand II. However, the delivery of the DLR hand has been delayed to the beginning of September. To mitigate the effect of this delay we have planned to start using other two hands developed in the laboratories of Siena and Pisa.
May 30, 2011 , by
Public Summary Month 5/2011
During the last two months our work has been focused especially on the third task EXP. In particular we completed the design of the instrumented object that will be used to measure forces and torques involved in robot grasp measurement and control. The project
specifications for the object are here summarized:
• possibility to get different shapes (cube, sphere, cylinder)
• forces and torques measurement at selected contact points
• measurement of contact point positions
We decided to develop a single instrumented core object on which external faces can be mounted creating several interaction geometries.



