



Jul 30, 2011 , by
Public Summary Month 7/2011
In the last two months the work of the HANDS.DVI partners has been focused on
• designing the algorithm of mapping synergies from the paradigmatic hand, the model of the human hand, to robotic manipulators with general kinematics
• realizing the experimental setups to be used in the next period of the project to validate the project results of HANDS.DVI.
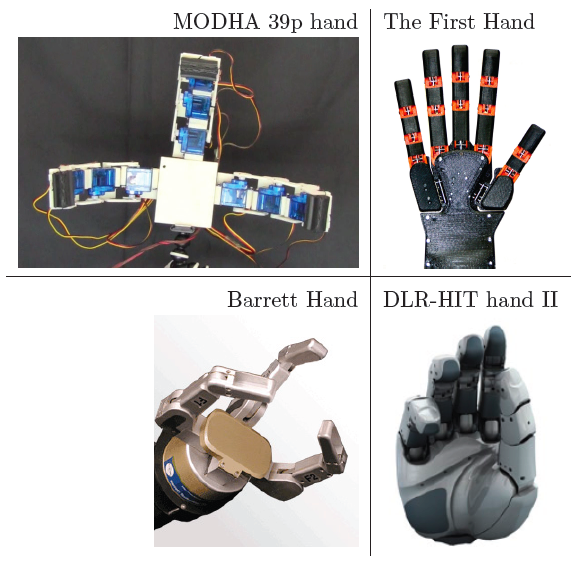
Note that for the experimental setup we planned to use a DLR-HIT hand II. However, the delivery of the DLR hand has been delayed to the beginning of September. To mitigate the effect of this delay we have planned to start using other two hands developed in the laboratories of Siena and Pisa.
Tags:
public summary



