



Feb 27, 2012 , by
Public Summary Month 2/2012
During the last two months the consortium has been performing further real world experiments with the first application of learning methods. Further work on our simulations and evaluations of those has been performed.
1) A new sampling strategy was developed and implemented. We used the new method to do an analysis for the GS20 gripper and the Dolt object. The whole set of tried grasp can be seen here, the successful ones after simulation here and the ones produced by the sampling process here (red = failed grasp, green = successful grasp, blue=unstable grasp).
2) We started to evaluate different aspects concerned with transferability between different simulation setups and real world setups.
3) A method for updating grasp priorities has been developed. For the Dolt object we performed a first set of experiments to compare the performance of the original grasp set and the set with updated priorities. We found a statistically significant success rate improvement.
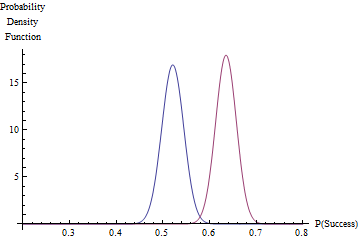
As the baseline grasp strategy for comparison, we have used grasped chosen manually by an experienced. We used 1029 grasp experiments as the basis for learning new priorities. We then tested and compared the learned priorities with those manually chosen. We found the success likelihood to be 52.1% +/- 4.6% with the manually chosen strategy (blue line) and 63.5%+/- 4.4% with the learned priorities (purple line). The uncertainties are chosen using the 95% confidence intervals. Thus, we obtain a clearly statistically significant improvement through the learning procedure, and it should be stressed again that the comparison was made with a state-of-the-art manual method.



