



Apr 11, 2012 , by
Public Summary Month 3/2012
During the last two months we have been performing further experiments to evaluate our priority adjustment methods. Further work was also done on our dynamic simulation methods.
1) Experiments with suction cup setup: We have performed extensive experiments with a suction cup setup. Initially we performed a baseline with grasps selected and prioritized by an expert user. The base line contained 3063 grasps of which 78.8% were successful. We then applied a learning scheme the adjust the grasp priorities. We were able to show that the update of priorities also improved the overall success probability. A statistical analysis showed that the 95% confidence intervals of the sampled means was separated giving strong evidence that the effect is not due to sampling. The plot below shows the distribution of the true success probabilities around the sampled values.


2) Automatic generation of good grasps from simulation: We have spend further work on generating grasps in simulation to replace the Virtual Grip Manager (manual grasp selection tool) for both suction cups and parallel grippers. Specifically we worked on selecting grasps with high quality and grasps that are distributed on the complete object. A quality estimate based on an approximate grasp probability that can be computed on arbitrarily sampled grasps has been implemented and explored. The experimental platforms have been prepared to start with validation experiments. These experiments will show whether the hand selected grasps can be efficiently replaced by automatically generated grasps.
3) Investigation of transferability between simulation environments: We have finished our work on the investigation of transferability of grasp representations from one simulated context to another. The results clearly show that only part of the grasp representation is transferable and that the specific part is highly dependent on the context that it is transferred to. Patterns in the data suggest that the transferability might improve using simple (fast) heuristics; this is however yet to be explored.
4) Extension of simulation methods to integrate uncertainty and improve transferability: Since our current simulations are by itself deterministic in respect to the outcomes for a certain pose when the same pose is tried several times we can not calculate realistic success probabilities based on the simulations alone. To reach the goal of calculating success probabilities for grasping with the SDH Schunk hand in a real setting, we firstly designed a new object that allows the evaluation of typical grasping pre-shape configurations. We then simulated grasping trajectories for certain pre-shape configurations using the new object and selected pose values where we observed changes in the success probabilities. To imitate stochastic outcomes in the simulation we added noise to the pose values we tried in the simulation. The selected points now wait for empirical testing in real grasping trials. Based on the success rate in the real grasping trials we hope to find easily transferable calibration values that allow to assess the uncertainty that has to be considered when transferring simulations outcome to real settings.
Feb 27, 2012 , by
Public Summary Month 2/2012
During the last two months the consortium has been performing further real world experiments with the first application of learning methods. Further work on our simulations and evaluations of those has been performed.
1) A new sampling strategy was developed and implemented. We used the new method to do an analysis for the GS20 gripper and the Dolt object. The whole set of tried grasp can be seen here, the successful ones after simulation here and the ones produced by the sampling process here (red = failed grasp, green = successful grasp, blue=unstable grasp).
2) We started to evaluate different aspects concerned with transferability between different simulation setups and real world setups.
3) A method for updating grasp priorities has been developed. For the Dolt object we performed a first set of experiments to compare the performance of the original grasp set and the set with updated priorities. We found a statistically significant success rate improvement.
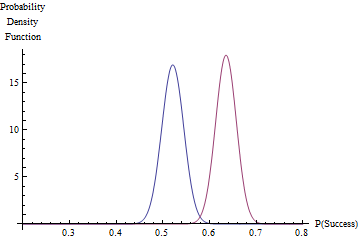
As the baseline grasp strategy for comparison, we have used grasped chosen manually by an experienced. We used 1029 grasp experiments as the basis for learning new priorities. We then tested and compared the learned priorities with those manually chosen. We found the success likelihood to be 52.1% +/- 4.6% with the manually chosen strategy (blue line) and 63.5%+/- 4.4% with the learned priorities (purple line). The uncertainties are chosen using the 95% confidence intervals. Thus, we obtain a clearly statistically significant improvement through the learning procedure, and it should be stressed again that the comparison was made with a state-of-the-art manual method.
Dec 13, 2011 , by
Public Summary Month 11/2011
During the last two months the consortium has been performing first real world experiments and further work on our simulation and learning methods has been performed.
1) After further preparations for the real world experiments in the SCAPE 2-finger setup were accomplished we performed a larger batch of real world experiment, with grasps generated from simulation. The video here visualizes the distribution of success (green) and failures (red) in this case.
2) Simulations of the Cranfield plate on a table using the SDH 3 finger hand have been modified and several million simulations have been executed. This video shows the success space. See here for simulation in progress.
3) To guarantees global consistency and avoids artifacts (steaming from the artificial segmenting of the data into cubicles) in our learning methods and condensation techniques we implemented a global probability estimate.



