



Oct 3, 2011 , by
Public Summary Month 10/2011
In the last two months we have been working on Task 2 (Positioning/Relocation) and Task 3 (Site Tolerance). Task 3 deals with the challenges of dimensional tolerances existing on construction sites. The objectives are, firstly to measure the real world data and secondly to develop a software prototype which maps the fabrication data to the acquired real world data. For demonstrating the human-robot cooperation we have prepared an installation for ETH Scientifica exhibition 2011 in Zürich.
http://www.dfab.arch.ethz.ch/web/e/forschung/216.html
For Scientifica 2011, the focus has been on robotic fabrication strategies in architecture in the scale of 1:1. The task consists of building an architecturally complex brick wall. In the demonstration robot unit employs an 3D scanning system which enables it to orient itself and at the same time to process the information gained from different materials and from the surrounding environment.
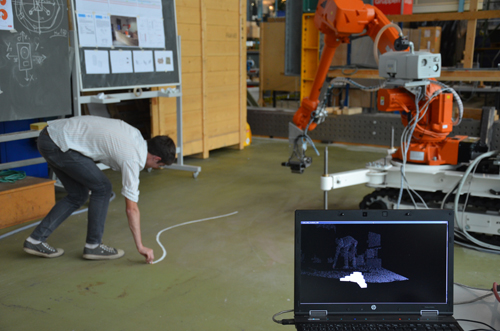
Fig. 1: A 3D scanner recognises the move of the hand, and by this way the hand move is recorded to build accordingly.

Fig. 2: Building according to the recorded hand movements (along the drawn line)
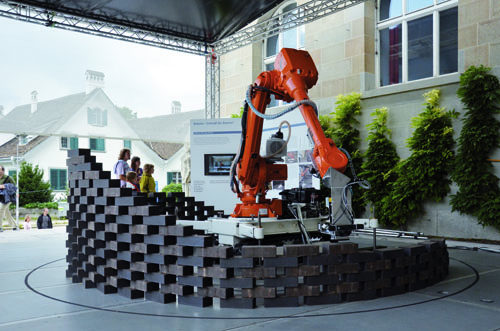
Fig 3: After the robot grasps the move of the hand, it builds the new position of the wall in an infinite loop accordingly.
Since the conceptual phase is now almost over, a theoretical research on the real case scenarios of the construction sites is needed to develop the concept into a real case prototypical demonstration, with the feedback coming from the current state of art of construction sites. Therefore, besides the demonstration we also went through a research on the past and the current state of art of robotics on construction sites. Some current robotic construction techniques involve brick laying, welding, cold folding, crack detection, surveying through solid walls, fitting equipment into inner walls, floor finishing, panel fixing, exterior wall painting, concrete distribution, application of bonding material, smoothing concrete, etc.



