Nov 29, 2011 , by
Public Summary Month 11/2011
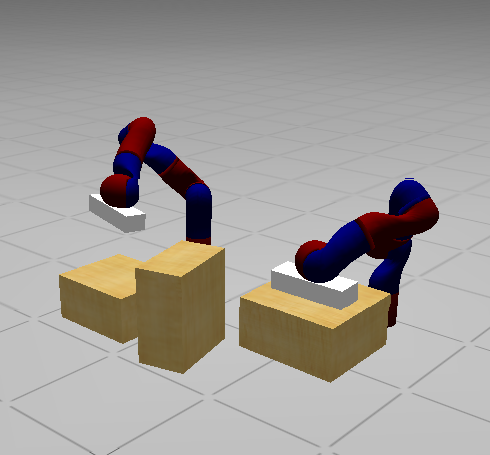
The experiment started working towards the second milestone, a two-robot grasp of a box. The idea is that both robots pick boxes independently, until one encounters a too heavy box, in which case it waits until the other robot assists it in picking it up. The two challenges are to have the robots move without colliding into each other (how does a robot know where the other robot is going to?), and to find a way to control both robots when they jointly hold a box. To test these algorithms, a simulation environment is first setup such that no harm is done to real robots in the experimental phase of development.