



Feb 10, 2012 , by
Public Summary Month 1/2012
TASK 3:
Figure 1 depicts the achieved rates of correctly detected objects in the 4 target SSVEP selection task for all eleven participants so far. This shows the successful application of the task in the majority of subjects. 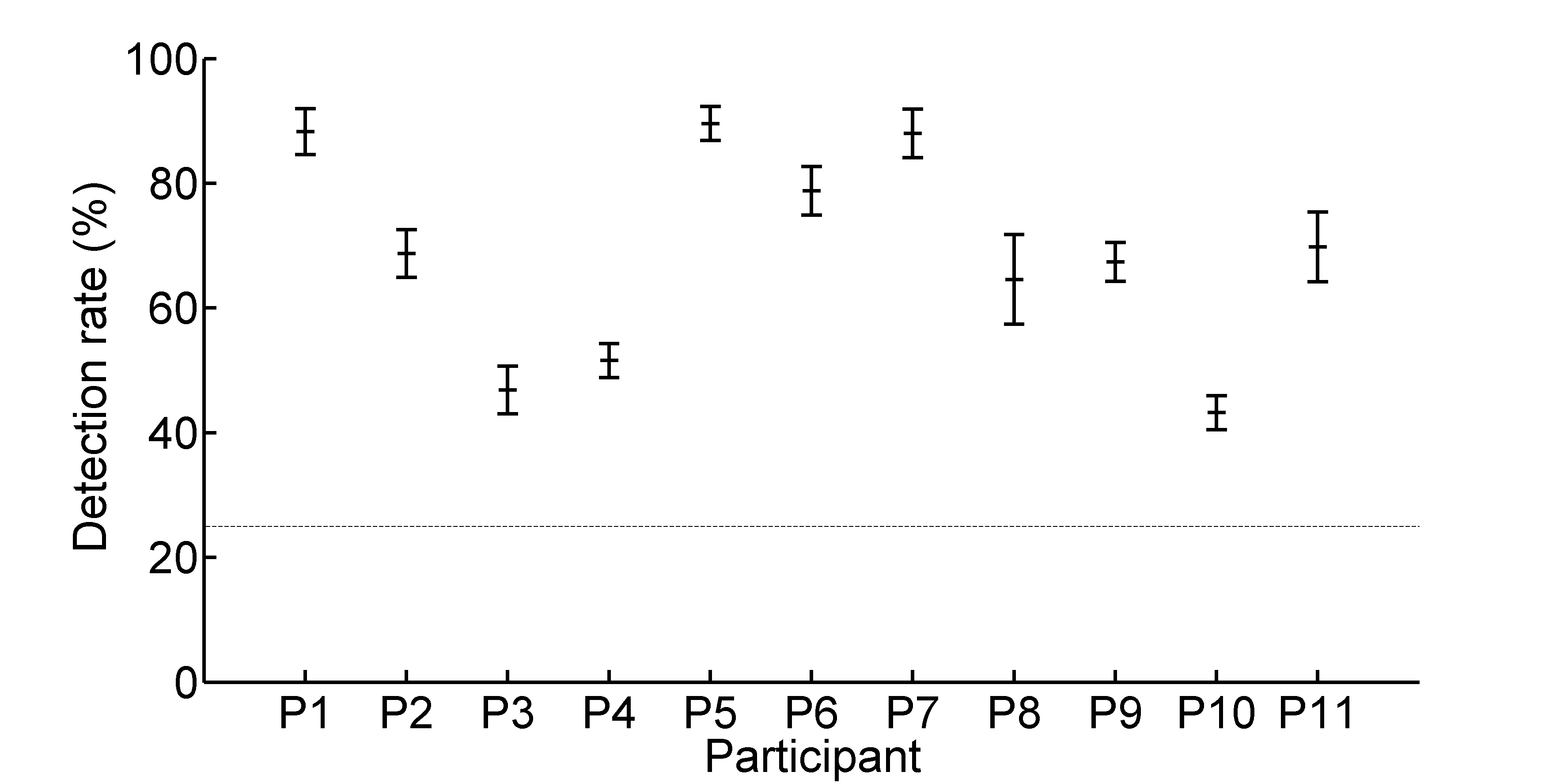
Fig. 1 Average detection rate of single subjects. Error bars indicate the standard error across sessions (4 to 6 sessions). The guessing level for a balanced 4 target session is at 25% (dotted line).
TASK 4:
Based on simultaneous MEG and ECG recordings of 3 additional subjects we currently test algorithms to remove ECG artifacts from the MEG signals without removing information in brain signals.
TASK 10:
Objects with strong convex surfaces prevent the virtual grasper to get a force closure grasp. Therefore, we temporarily neglect repulsive forces driving the grasper away from the target center point. The calculation time for a force closure grasp is reduced to less than 5 s for the majority of CAD-generated grasping targets.
For fine concave structures (e.g. bristles) the BSP-tree collision detection algorithm requires too much time and is not parallelizable. We developed a new collision detection strategy which we will call shriveled bounds. Although the bristles of the toothbrush (see Fig. 2) do not prevent the object from being grasped further optimization is required. 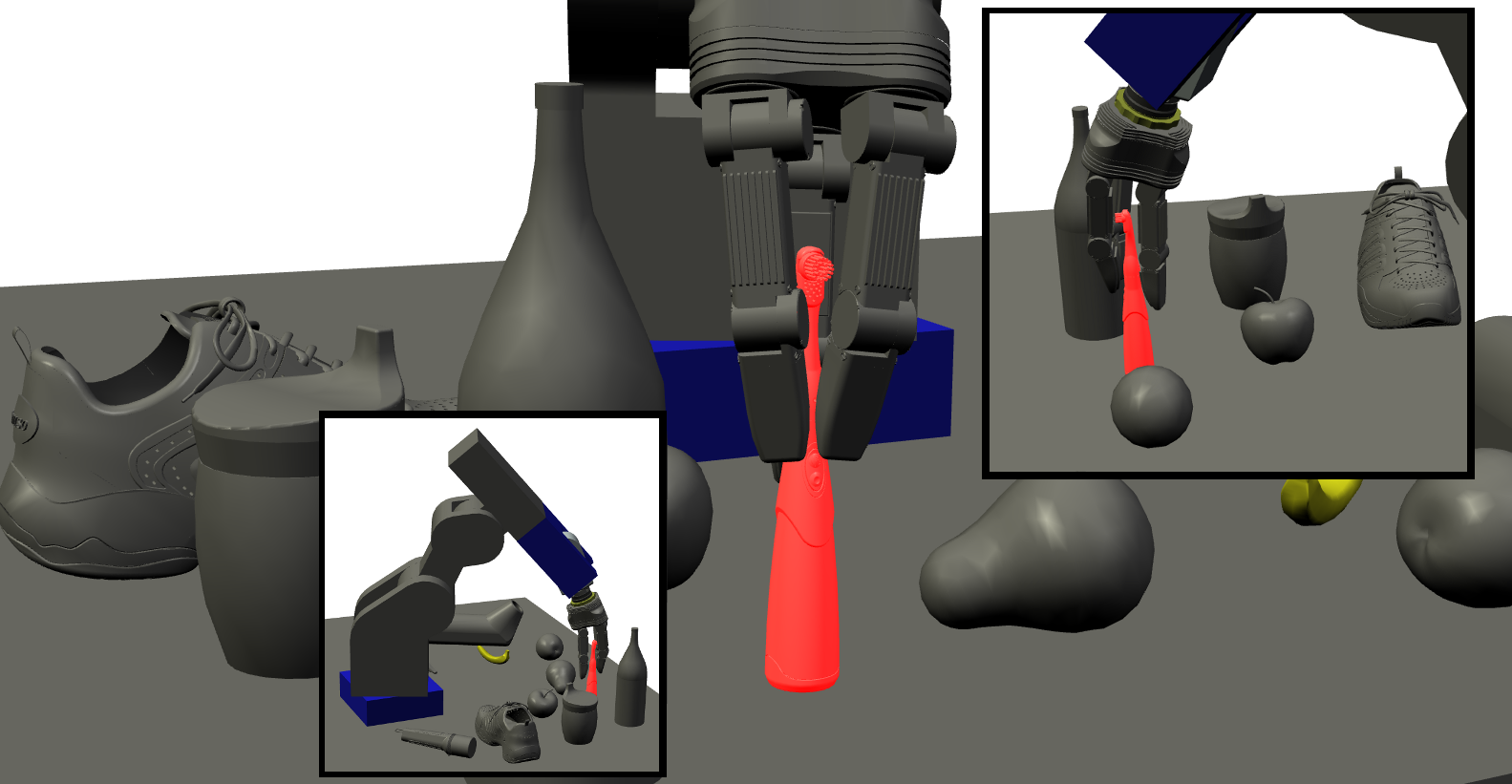
Fig. 2: A force-closure grasp of a toothbrush
TASK 11:
Recently, a poster was accepted at the CogSys Conference 2012 in Vienna, Austria.
Dec 20, 2011 , by
Public Summary Month 11/2011
TASK 3, 4
So far our tests in a movement imagery task revealed huge performance differences between subjects. In our MEG setup we found that magnetic activity of the heart is the source of another important artefact. The main work in this project phase will be the adjustment of the algorithms to allow for online removal of these artefacts.
TASK 5:
We integrated the functionality of the selection prototype, the virtual robot and grasp planner to build the virtual prototype.
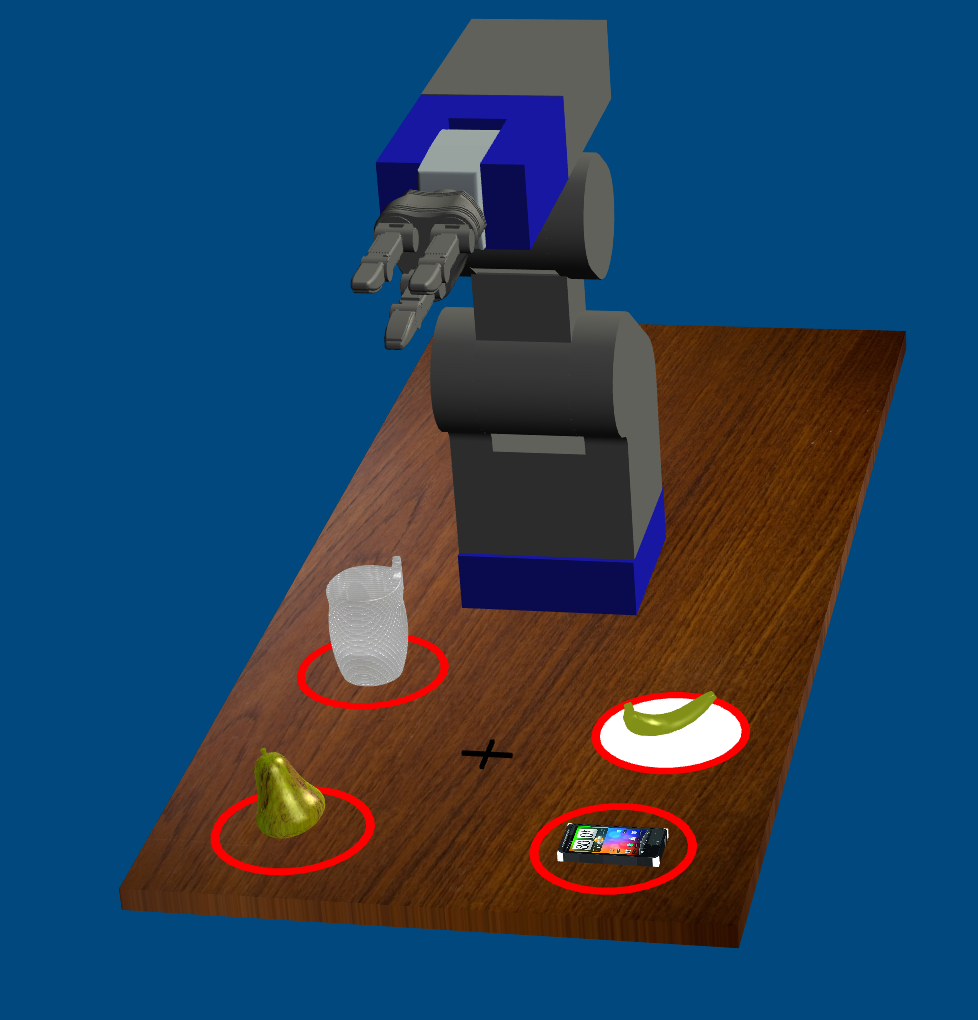
Fig. 1 Integrated Scenario
TASK 7:
The grasp planning is still very time-consuming. To reduce the waiting period until completion of the planned grasp we optimized the process in the following way: The transformation calculation from attractive or repulsive force at the fingertip of the grasper to a torque in the joints of the robot is parallelized.
Currently the system comprises the parts depicted in Fig. 2.
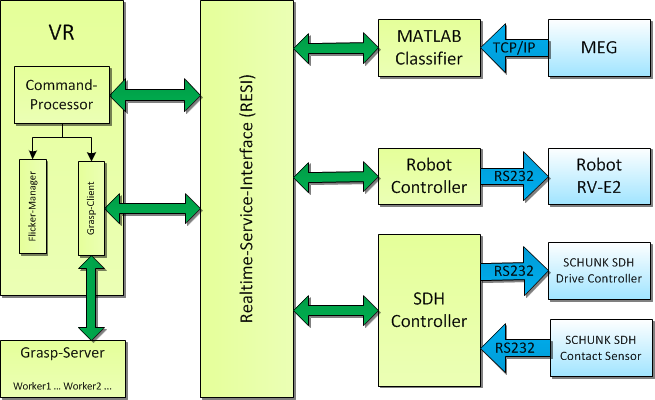
Fig. 2 System Structure
Oct 20, 2011 , by
Public Summary Month 09/2011
In the last bi-monthly report period we were able to assemble the Mitsubishi RV-E2 with the SCHUNK SDH Gripper (T8) and transferred the final CAD-geometry models to our VR-tool.

Fig. 1 Final geometry model of the manipulator and first test scenario


Fig. 3: Generated grasps in the new scenario all classified as force closure
As the grasp planner moves the robot only very close to the target and cannot assure predefined grasping forces, the final step to get a firm hold of an object has to be done only by the robot controller without VR-support. This functionality is realized as a service.
We tested three subjects in a target selection task based on steady state visual evoked potentials (SSVEP) while we recorded the magnetoencephalogram (MEG). In the online processing cycle we implemented the possibility to continuously retrain a classifier within a BMI-session to compensate non stationarities. This approach fosters mutual adaptation of classifier and human: the classifier learns the subject’s brain patterns while the subject learns to control the actuator using the classifier.
Aug 19, 2011 , by
Public Summary Month 7/2011
In Brain-Computer-Interface settings the task of the subjects is to deliberately modify brain activation to communicate. The imagery of motor actions and to focus attention to different flickering objects are two communication strategies implemented in the first period.
We intend to select an object to be grasped by presenting flickering lights at different frequencies, while the subjects have to focus their attention to one object. From brain waves we decode the frequency of the attended object.

Fig. 1 Stimulus setup. Top: Objects are presented on discs, which can flicker at a defined frequency. Bottom: The flicker frequency is physiologically represented in the MEG signal
A first version of a new algorithm for grasp and trajectory planning is developed. The algorithm generates point poles on each surface triangle of the grasping target. Between these poles and the ones placed on the manipulator a force field is assumed. The impact of the forces on the manipulator is simulated and used as trajectory.



Fig. 2 Robotic manipulator used in this experiment



