Mar 31, 2011 , by
Public Summary Month 3/2011
Task 1: Prototype integration
Activities performed:
- Electrical modification on the mobile platform
- Re-design and realization of mechanical supports for the measurement and 3D sensors
- Mounting of 3D sensors and robotic arm on the mobile platform
- Mounting of 7DOF robotic arm on the mobile platform


Task 2: Implementation and integration of adaptive arm and platform controllers
Activities performed:
- Definition and implementation of the communication protocol between LabVIEW and ROS
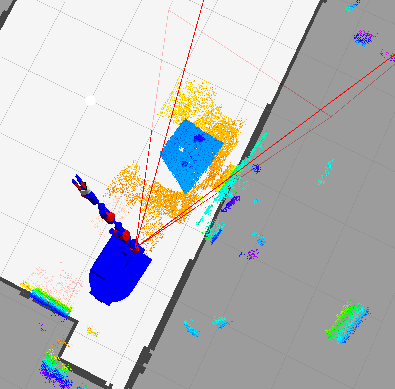
- Environment modeling completed
- Navigation considering environment modeling in progress
- Arm control considering environment modeling in progress