



Jan 30, 2011 , by
Public Summary Month 1/2011
The first goal of this experiment is the design and assembly of an improved prototype of a mobile manipulation robot for diagnosis tasks.
During the first four months of the project, Task 1 and Task 2 started and the following results have been achieved.
Task 1: Prototype integration
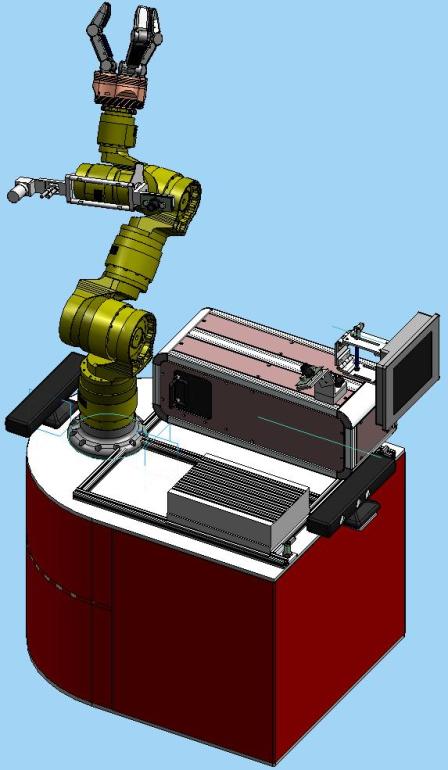
After the definition of the requirements for 3D environment sensors, a set of them has been compared and evaluated. Moreover a preliminary solution for the integration of the sensors, robotic arm and mobile platform based on experimental and simulation results has been designed, as illustrated in the figure below.
Task 2: Implementation and integration of adaptive arm and platform controllers
Control and communication architecture has been defined and first trials on communication, 3D point cloud generation and path planning have been performed.



