



Sep 28, 2012 , by
Public Summary Month 9/2012
4th Public Report
In tests with a robot system utilizing a phantom simulator that imitates roughly the situation in the OP scene when holding retractors we could identify that it’s beneficial to mount the robot in a higher position. This way it can reach the workspace approaching from above and the robot will less likely get to edge of configuration space (above/below). Further mounting the robot side wards to the column instead should prevent the robot to get into singularities that occurred often in the tests due to alignment of two rotational axes.
The gripper was redesigned to be functional again if robot is mounted differently. In summary these changes reduce the risks of the robot to collide with patient staff. The new setup can be seen in Figure 1.
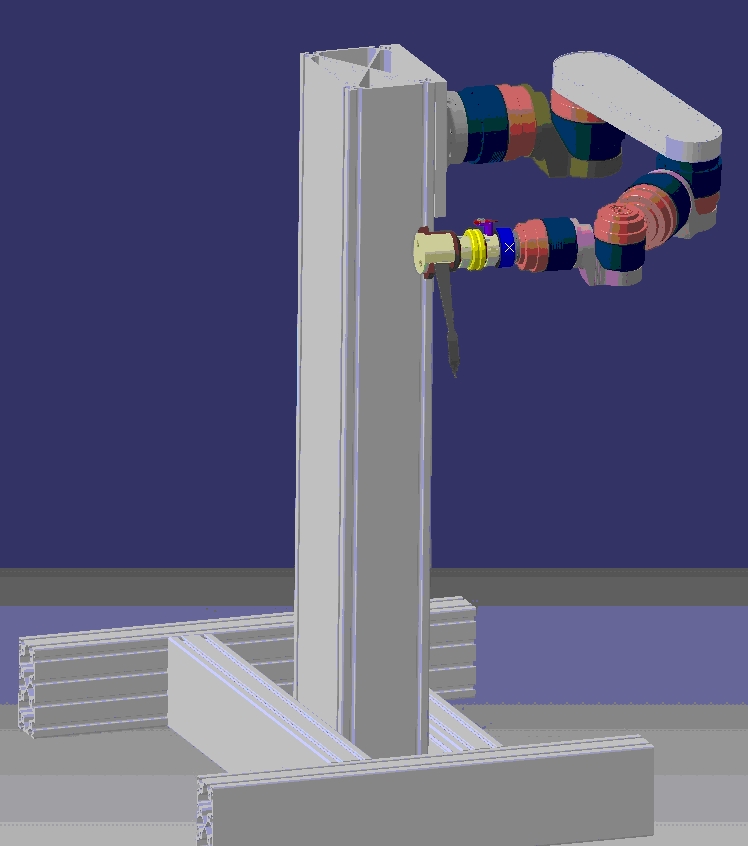
Figure 1: CAD design of the column for the newly arranged retractor holding robot utilizing the new gripper design.
We started testing markers with chess patterns to track the 6D pose of the tools. These markers were bundled in a cube so they can be seen from every direction and mitigate the problem of partial occlusions. However, a camera setup different than what was previously planned might be needed, due to the lack of precision when the markers are far away from the camera.
The positioning of the eye-to-hand camera relative to the rest of the system has been specified.
To handle the risks brought along with utilizing a robot system medical and technical experts met and discussed what risks have to be handled and how this can be done. A list of system components was created, together with associated safety standards.



