



Jun 3, 2013 , by
Public Summary Month 5/2013
8th Public Report:
The complete robot system is currently being integrated. A movable column, capable of carrying both robot arms, their controllers and powers supplies was constructed, most parts have been fabricated in the workshop and the assembly has begun. The power supplies, the controllers, cameras and emergency chain components will be integrated in the column.
New USB-to-CAN interfaces were acquired and the drivers were integrated in ROS framework, excluding the necessity for a second workstation just for interfacing with the F/T Sensor.
A preliminary algorithm was developed to hold the tool after the surgeon couples it to the gripper. It only rotates the retractor around a bone axis keeping the tip fixed, but it showed us that the robot responds well to changes of the external forces, moving the tool in a smooth manner (Figure 1).
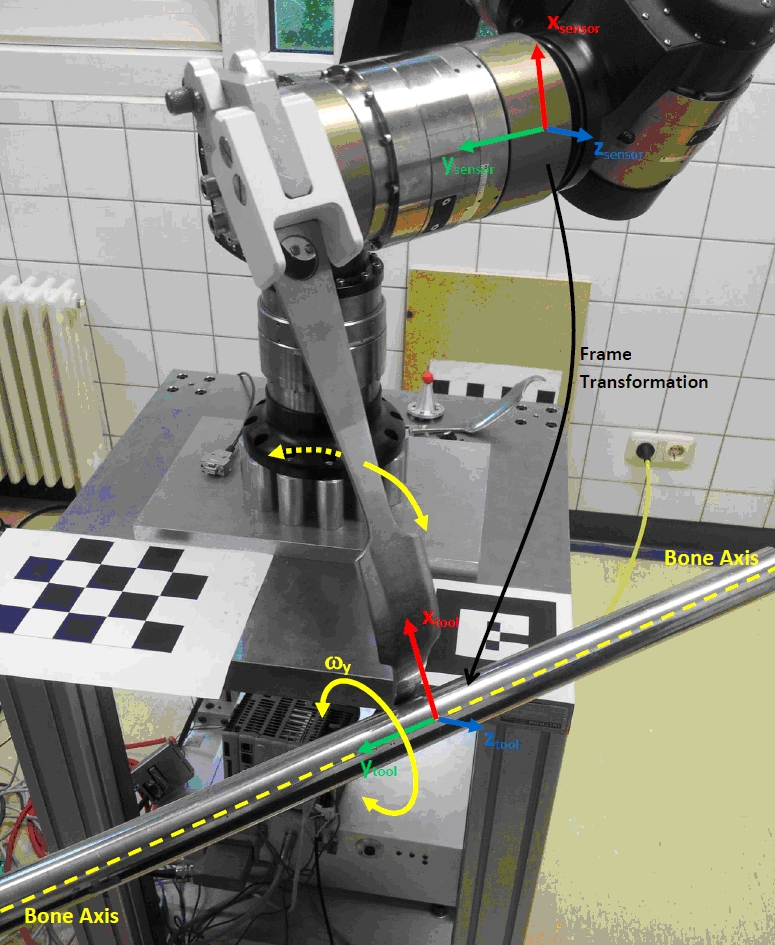
Figure 1: Current configuration and movements performed by the robot while holding the retractor (current algorithm only allows rotations around a bone axis).



