



Nov 28, 2012 , by
Public Summary Month 11/2012
5th Public Report
Improvements have been made to the F/T free mode in order for the robot to move more smoothly. Holding mode also needs to be improved since the movement is not smoth.
A collision detection algorithm has been implemented in order to prevent collisions between the robot and the objects/people in the environment and with itself. During simulated tests, the system has proved capable of stopping the robot automatically before hitting objects (Figure 1). Improvements can still be made since the collision map is not updated in real time while the robot is moving.
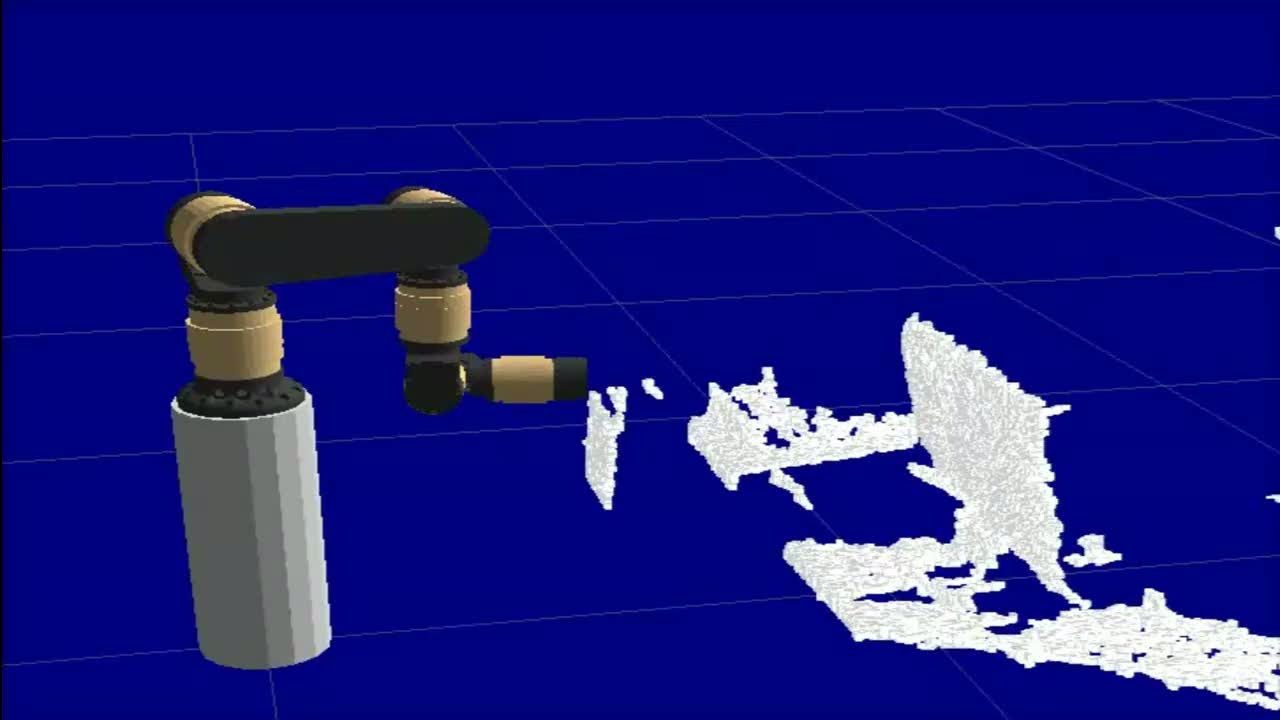
Fig. 1- Simulation of the Schunk lightweight robot arm approaching an obstacle detected by the camera system.
Although the real robot is not assembled yet finally, most of the control modules are present and have been partially developed and tested successfully in simulation mode, so their integration in a main control program has started.



