Nov 27, 2011 , by
Public Summary Month 11/2011
The Metronom 3D sensor has been mounted on the mobile robot Dynamaid. Its measurements are more precise and less noisy than Kinect measurements.
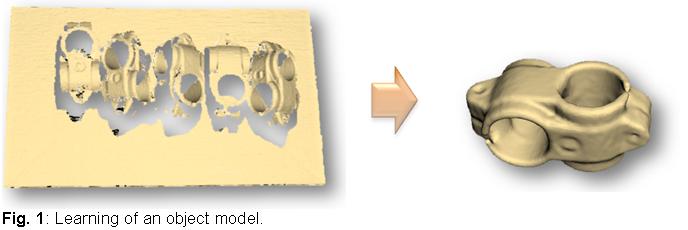
The experiment partners started work on the learning of object models from examples and active object recognition.
For the learning of object models, scans from different views are registered and unconstrained detection of geometric primitives is performed (Fig. 1).
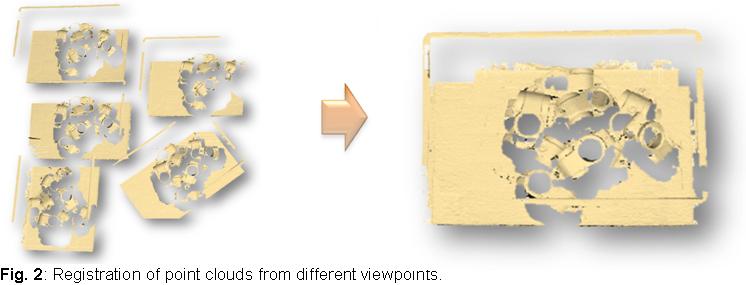
For active object recognition, we also registered depth measurements from different views (Fig. 2). This reduces occlusion effects and facilitates recognition.